Tester Inwerterów w wersji B jest zmodernizowaną mikroprocesorową wersją poprzedniego testera w wersji A. Testery w obydwóch wersjach są uniwersalnym narzędziem, przydatnym przy sprawdzaniu działania przede wszystkim takich elementów napędów (w tym HVAC) jak: Inwertery (falowniki / sterowniki silników np. kompresorów lub wentylatorów), dotyczy to zarówno sterowników napędów trójfazowych, jak i jednofazowych, prądu przemiennego (AC) oraz zmiennego i stałego (DC). Różnica polega na tym, że w wersji B można dodatkowo oglądać wyniki „zapamiętane” w czasie testowania, co daje możliwość testowania nawet bardzo krótkich sygnałów podawanych przez inwerter na silnik (np. w lodówkach, lub innym sprzęcie AGD oraz HVAC).
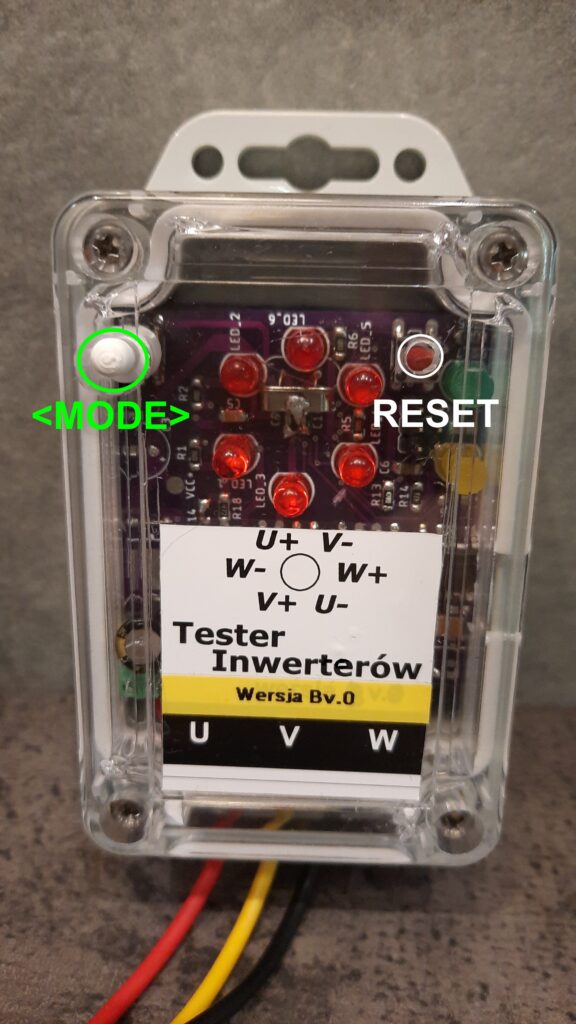
Konstrukcja urządzenia. Tester w wersji B składa się z obudowy, w której umieszczonych jest 8 różnokolorowych diod LED, z czego 6 czerwonych wskazuje wynik testu, zielona sygnalizuje zasilanie a żółta gotowość do pracy. Tester wyposażony jest również w 3 zakończone „krokodylkami” przewody przyłączeniowe umożliwiające podłączenie testera do sprawdzanego obwodu.
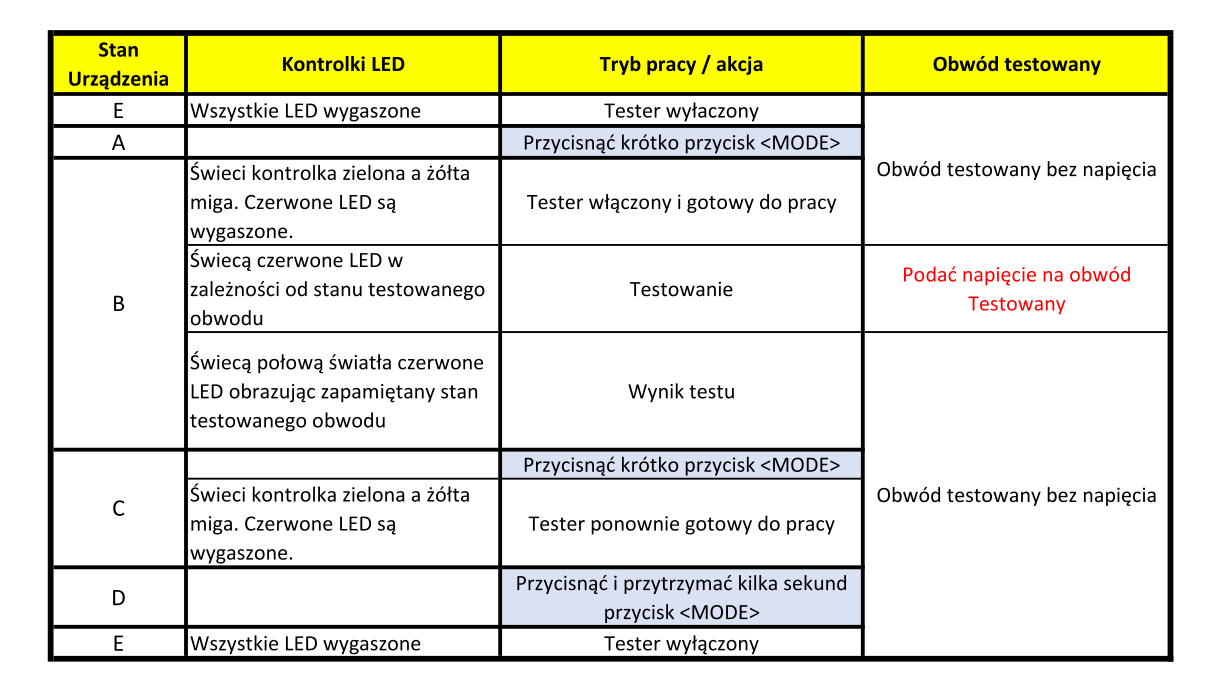
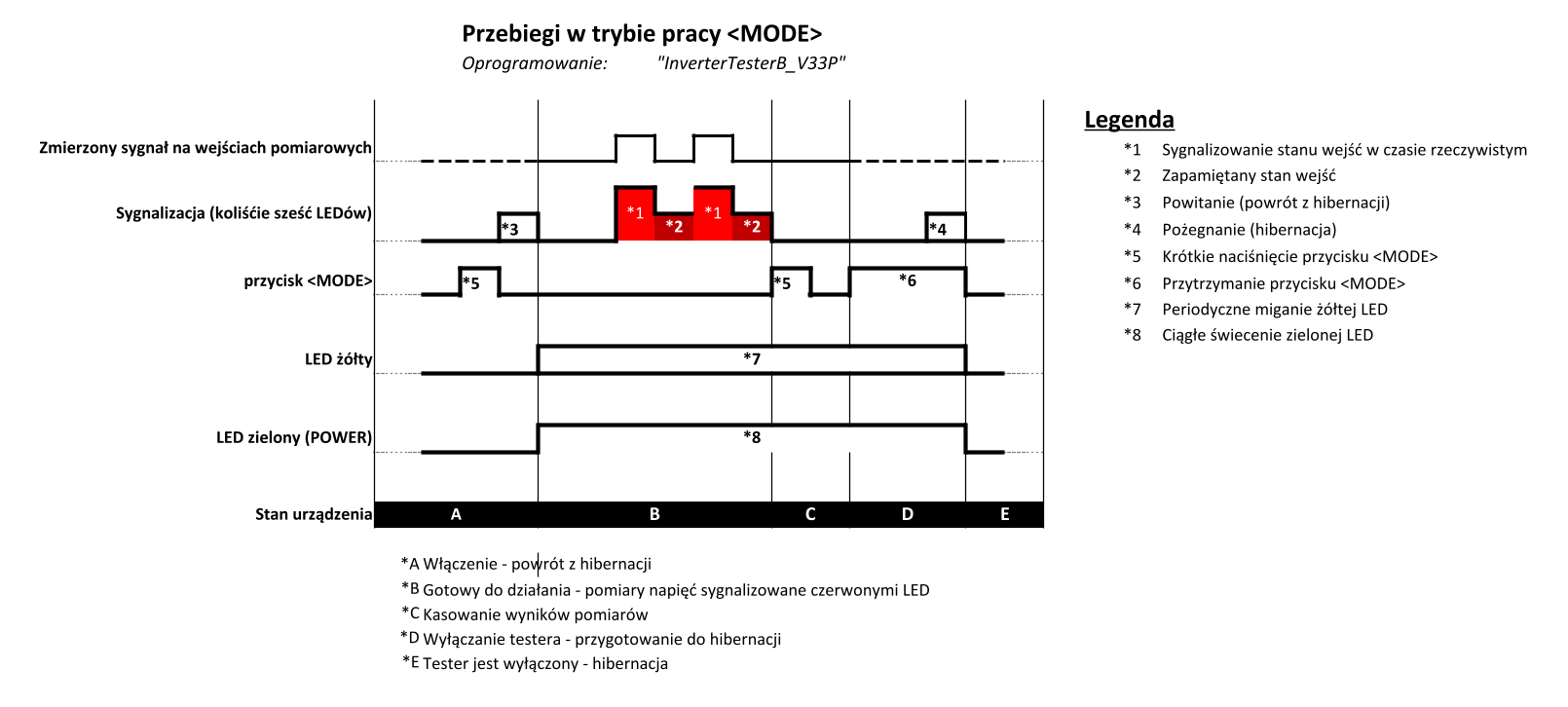
Tryby pracy testera.
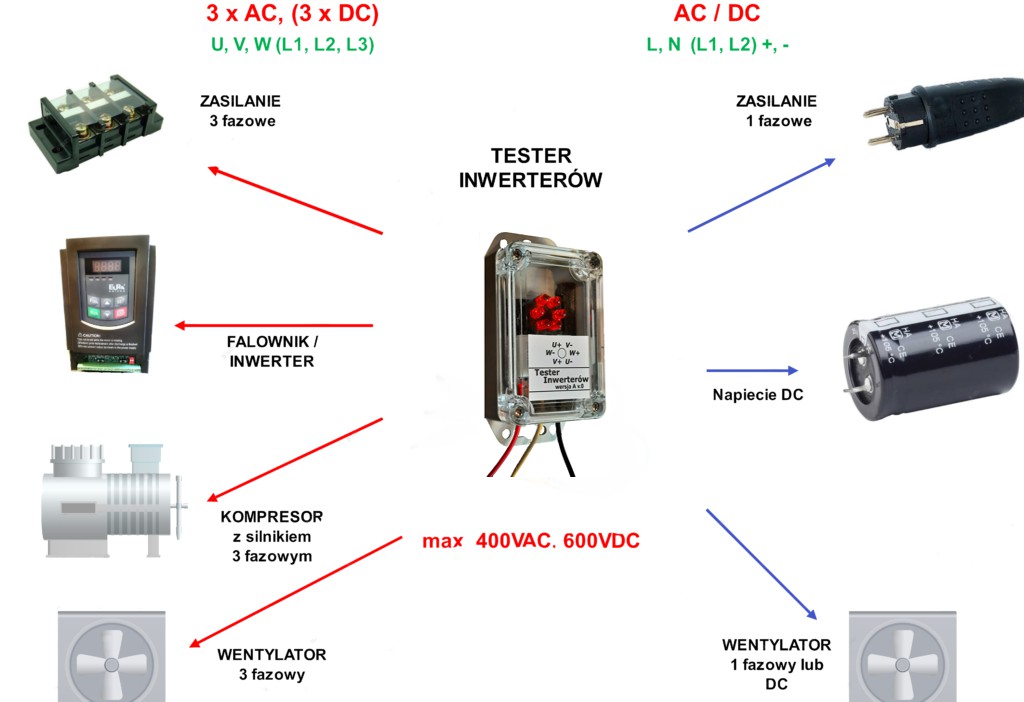
Przygotowanie do sprawdzania obwodów trójfazowych. Tester w wersji B przyłączamy dokładnie tak samo jak w przypadku testera w wersji A, zgodnie z opisami przewodów, które przedstawia fot. niżej, tzn. przewód „U” (czerwony) łączymy z wyjściem inwertera oznaczonym jako „U” lub z zaciskiem zasilania trójfazowego AC oznaczanym zwykle jako „L1” lub „R”, zaś przewody „V” i „W” (w kolorach odpowiednio: żółty i czarny) łączymy w analogiczny sposób z odpowiednimi zaciskami tego samego obwodu. Następnie załączamy zasilanie bateryjne testera, nie włączając jeszcze zasilania trójfazowego testowanego obwodu.
Testowanie obwodów trójfazowych.
Załączanie zasilania testera odbywa się poprzez krótkie naciśnięcie przycisku <MODE> (na zdjęciu powyżej oznaczonego zielonym opisem), znajdującego się u góry, po lewej stronie obudowy. Przycisk czerwony zaś umieszczony u góry, po prawej stronie obudowy (na zdjęciu oznaczony białym opisem) służy do resetowania testera. Jeśli zaistnieje taka potrzeba wciskamy go np. długopisem lub innym cienkim narzędziem.
Gotowość do testów sygnalizują dwie kontrolki, z których zielona powinna być oświecona (sygnalizacja zasilania), żółta zaś pulsuje sygnalizując moment wykonywania testów.
Po załączeniu testowanego napięcia U, V, W, wynik testu sygnalizowany jest oświeceniem się diod LED w kolorze czerwonym, w taki sposób, że pojawienie się napięcia na dowolnej z faz jest sygnalizowane słabym świeceniem odpowiednich LED (aż do skasowania wyników testu za pomocą lewego, białego przycisku), jest to informacja o „zatrzaśnięciu” wyniku testu. Mocne świecenie kombinacji czerwonych LED sygnalizuje bieżący wynik testu i ma charakter chwilowy.
Wyłączanie testera. Ponieważ tester zasilany jest bateryjnie, posiada on możliwość wyłączenia zasilania tak, aby w czasie bezczynności pobierał jak najmniej energii. Wyłączenie polega na hibernacji mikrokontrolera, co znacznie zmniejsza zapotrzebowanie na energie czerpaną z baterii. Wyłączenie testera dokonuje się poprzez przyciśnięciu i przytrzymaniu kilka sekund przycisku <MODE>. Podczas gdy tester jest dłuższy czas nieużywany następuje jego samoczynne wyłączenie. Po wyłączeniu tester ma wygaszone wszystkie diody LED i pobiera szczątkowe napięcie z baterii.
Wymiana baterii.
Odkręcić 4 wkręty w wieku obudowy testera i oddzielić wieko od obudowy.
Ostrożnie usunąć płytkę elektroniki (PCB) i wyjąć „koszyczek” z bateriami.
Wymienić baterie na nowe (tzw. paluszki „AA” 1,5V).
Włożyć „koszyczek” z bateriami do obudowy, następnie umocować płytkę elektroniki (PCB).
Założyć wieko obudowy, ze zwróceniem uwagi na prawidłowe ułożenie uszczelki silikonowej i dokręcić delikatnie wieko do obudowy.
Testowanie obwodów jednofazowych. W tym przypadku przewód testera oznaczony jako „U” (w kolorze czerwonym) podłączamy do zacisku zasilania AC oznaczonym w badanym urządzeniu jako „L” lub zacisku napięcia stałego DC oznaczonym jako „+” lub „DC+” lub „P+”. Natomiast żółty przewód testera oznaczony jako „V” podłączamy do zacisków oznaczonych jako „N” w obwodach AC lub „-” albo „DC-” albo „N” w obwodach prądu stałego DC. Zacisk testera oznaczony jako „W” (czarny) musi zawsze pozostawać niepodłączony.
Uwaga !
Przewód testera w kolorze czarnym, oznaczony jako „W” we wszystkich pomiarach jednofazowych nie może być podłączany do żadnego obwodu. Proszę upewnić się, że przewodząca prąd końcówka krokodylkowa jest dobrze zaizolowana i nie zwiera się np. z żadną częścią metalową, mogącą przewodzić prąd elektryczny.
Wyniki sprawdzania obwodów Testerem Inwerterów. Poprawny wynik podczas sprawdzania obwodów testerem pokazano w tabeli poniżej.
Rodzaj testowanego obwodu
Podłączone zaciski
Poprawne wskazania testera
Trójfazowy AC
U, V, W
Wszystkie LED świecą
Jednofazowy AC
U, V
4 LED świecą (U+,U-,V+,V-)
Jednofazowy DC
U, V
2 LED świecą * (U+,V- lub U-, V+)
* w zależności od polaryzacji napięcia DC
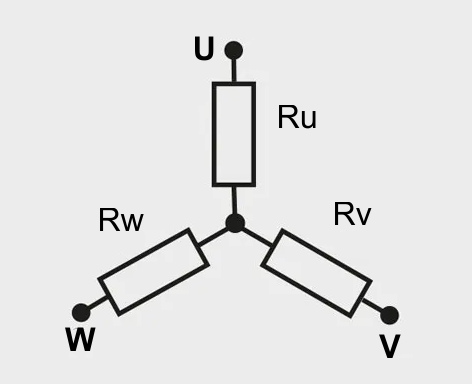
Aby uzyskać poprawne wyniki pomiaru, w sprawdzanym obwodzie musi występować napięcie większe od 100VDC i nie może ono przekraczać 400VAC (600VDC). Świecenie diod LED podczas testowania obwodów trójfazowych jest równoznaczne z przepływem prądu w danej gałęzi, tak jakby odbiorniki były połączone w „gwiazdę” (patrz rys. poniżej).
Podłączenie testera jest równoznaczne połączeniu odbiorników w „gwiazdę”.
Możliwe jest przyłączanie testera równolegle z silnikiem lub innym odbiornikiem prądu w celu bieżącego monitorowania zasilania tego odbiornika.
Uwaga !
Zachowaj ostrożność – pracujesz z napięciami niebezpiecznymi dla życia. Przed przyłączaniem testera upewnij się, że w testowanym obwodzie nie występuje napięcie (do tego celu służą certyfikowane przyrządy pomiarowe). Na czas pracy zabezpiecz siebie i otoczenie przed działaniem wysokiego napięcia, zwłaszcza kiedy pracujesz w trudnych warunkach, np. na wysokości, na mokrej powierzchni. Używaj środków ochrony osobistej i dbaj o stosowanie zasad BHP, które m.in. dotyczą pracy z niebezpiecznym dla życia napięciem.
Pamiętaj !
Wszystko co robisz, robisz na własną ODPOWIEDZIALNOŚĆ. Twoje decyzje mogą mieć nieodwracalny skutek – zachowaj maksymalną ostrożność !
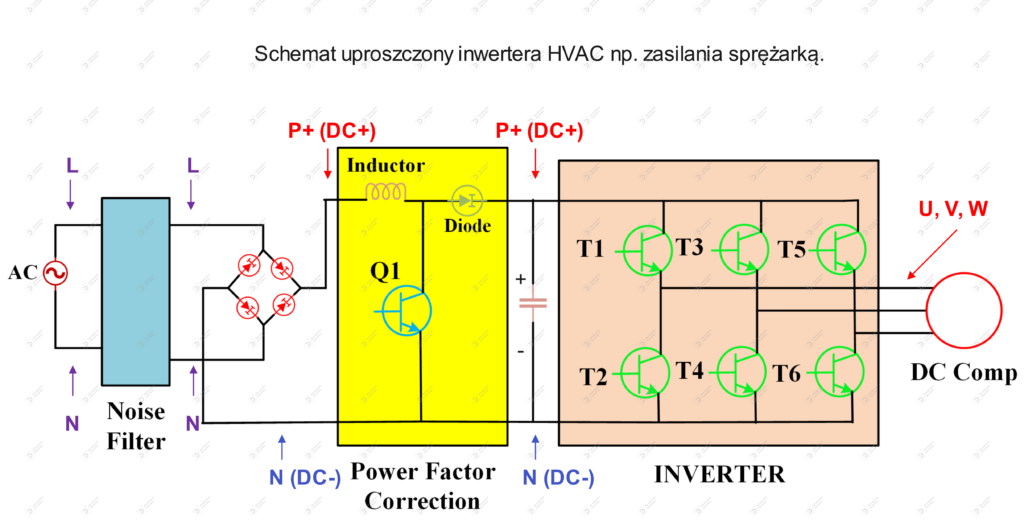
Przykład testowania obwodów AC i DC jednostki zewnętrznej klimatyzatora. Poprawny wynik wszystkich testów w obwodach oznaczonych strzałkami sugeruje poprawne działanie sterowania silnikiem sprężarki. Jeśli nadal występują nieprawidłowości w pracy sprężarki, najprawdopodobniej jest ona uszkodzona. Analogiczny układ jak poniższy, może występować także w przypadku sterowania wentylatorem / wentylatorami.
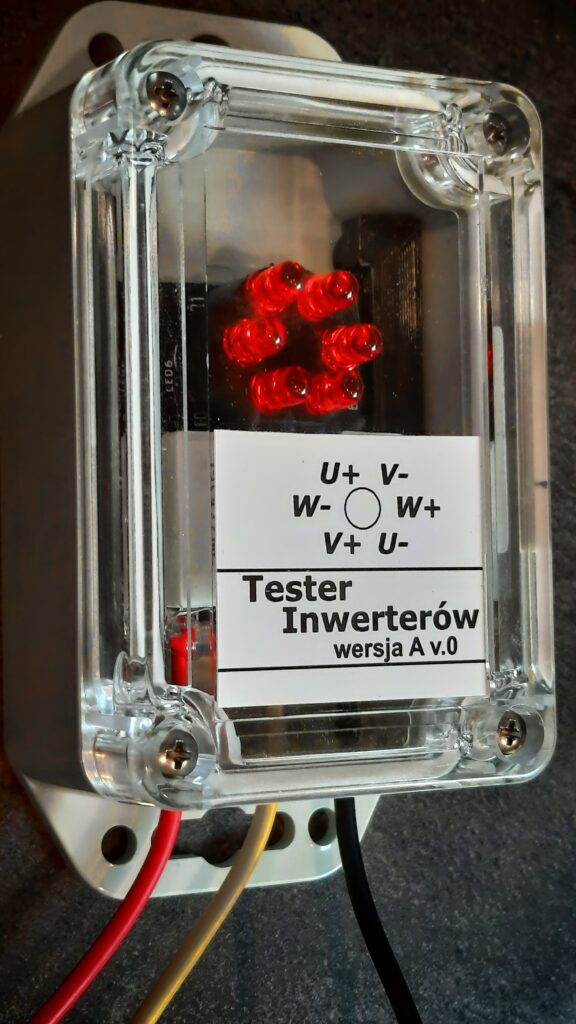
Tester Inwerterów w wersji A. jest uniwersalnym narzędziem przydatnym przy sprawdzaniu działania przede wszystkim takich elementów napędów (w tym HVAC) jak: Inwertery (falowniki / sterowniki silników np. kompresorów lub wentylatorów), dotyczy to zarówno sterowników napędów trójfazowych, jak i jednofazowych, prądu przemiennego (AC) oraz zmiennego i stałego (DC).
Konstrukcja urządzenia. Tester składa się z obudowy, w której umieszczonych jest 6 diod LED wskazujących wynik testu, oraz zakończonych „krokodylkami” 3 przewodów przyłączeniowych służących do podłączania się do sprawdzanego obwodu.
Sprawdzanie obwodów trójfazowych. Tester przyłączamy zgodnie z opisami umieszczonymi na kablach, tzn. przewód „U” łączymy z wyjściem inwertera oznaczonym jako „U” lub z zaciskiem zasilania trójfazowego AC oznaczonym jako „L1” lub „R”, przewody „V” i „W” również łączymy w analogiczny sposób z odpowiednimi zaciskami tego samego obwodu.
Sprawdzanie obwodów jednofazowych. W tym przypadku przewód testera oznaczony jako „U” podłączamy do zacisku zasilania AC oznaczonym w badanym urządzeniu jako „L” lub zacisku napięcia stałego DC oznaczonym jako „+” lub „DC+” lub „P+”. Natomiast przewód testera oznaczony jako „V” podłączamy do zacisków oznaczonych jako „N” w obwodach AC lub „-” albo „DC-” albo „N” w obwodach prądu stałego DC. Zacisk testera oznaczony jako „W” musi zawsze pozostawać niepodłączony.
Uwaga !
Przewód testera oznaczony jako „W” we wszystkich pomiarach jednofazowych nie może być podłączany do żadnego obwodu. Proszę być pewnym, że nie zwiera on się z żadną częścią metalową, mogącą przewodzić prąd elektryczny.
Wyniki sprawdzania obwodów Testerem Inwerterów. Poprawny wynik podczas sprawdzania obwodów testerem pokazano w tabeli poniżej.
Rodzaj testowanego obwodu
Podłączone zaciski
Poprawne wskazania testera
Trójfazowy AC
U, V, W
Wszystkie LED świecą
Jednofazowy AC
U, V
4 LED świecą (U+,U-,V+,V-)
Jednofazowy DC
U, V
2 LED świecą * (U+,V- lub U-, V+)
* w zależności od polaryzacji napięcia DC
Aby uzyskać poprawne wyniki pomiaru, w sprawdzanym obwodzie musi występować napięcie większe od 100VDC i nie może ono przekraczać 400VAC (600VDC). Świecenie diod LED podczas testowania obwodów trójfazowych jest równoznaczne z przepływem prądu w danej gałęzi, tak jakby odbiorniki były połączone w „gwiazdę” (patrz rys. poniżej).
Podłączenie testera jest równoznaczne połączeniu odbiorników w „gwiazdę”.
Możliwe jest przyłączanie testera równolegle z silnikiem lub innym odbiornikiem prądu w celu bieżącego monitorowania zasilania tego odbiornika.
Uwaga !
Zachowaj ostrożność – pracujesz z napięciami niebezpiecznymi dla życia. Przed przyłączaniem testera upewnij się, że w testowanym obwodzie nie występuje napięcie (do tego celu służą certyfikowane przyrządy pomiarowe). Na czas pracy zabezpiecz siebie i otoczenie przed działaniem wysokiego napięcia, zwłaszcza kiedy pracujesz na wysokości i/lub na mokrej powierzchni. Używaj środków ochrony osobistej i dbaj o stosowanie zasad BHP, które m.in. dotyczą pracy z niebezpiecznym dla życia napięciem.
Pamiętaj !
Wszystko co robisz, robisz na własną ODPOWIEDZIALNOŚĆ. Twoje decyzje mogą mieć nieodwracalny skutek – zachowaj maksymalną ostrożność !
Przykład testowania obwodów AC i DC jednostki zewnętrznej klimatyzatora. Poprawny wynik wszystkich testów w obwodach oznaczonych strzałkami sugeruje poprawne działanie sterowania silnikiem sprężarki. Jeśli nadal występują nieprawidłowości w pracy sprężarki, najprawdopodobniej jest ona uszkodzona. Analogiczny układ jak poniższy, może występować także w przypadku sterowania wentylatorem / wentylatorami.
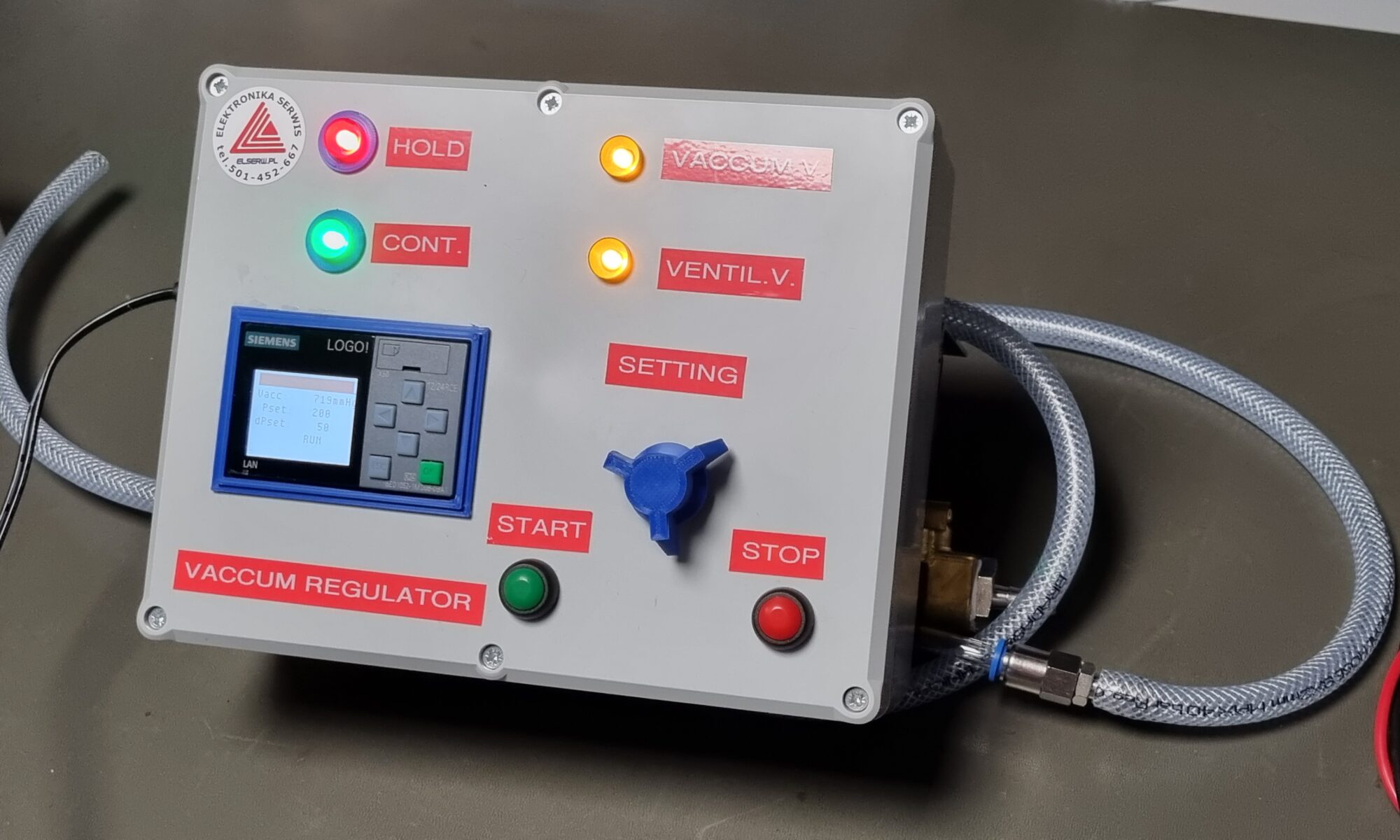
Regulator podciśnienia (VACCUM REGULATOR) został wykonany na zlecenie naszego klienta, firmy z sektora chemicznego. Jego podstawowe działanie polega na automatycznym utrzymaniu podciśnienia w zbiorniku reakcyjnym z dokładnością do 1mmHg. Urządzenie współpracuje z zewnętrzną pompą próżniową oraz systemem odprowadzania gazów i reaktorem chemicznym, tzw. „wyparką”.
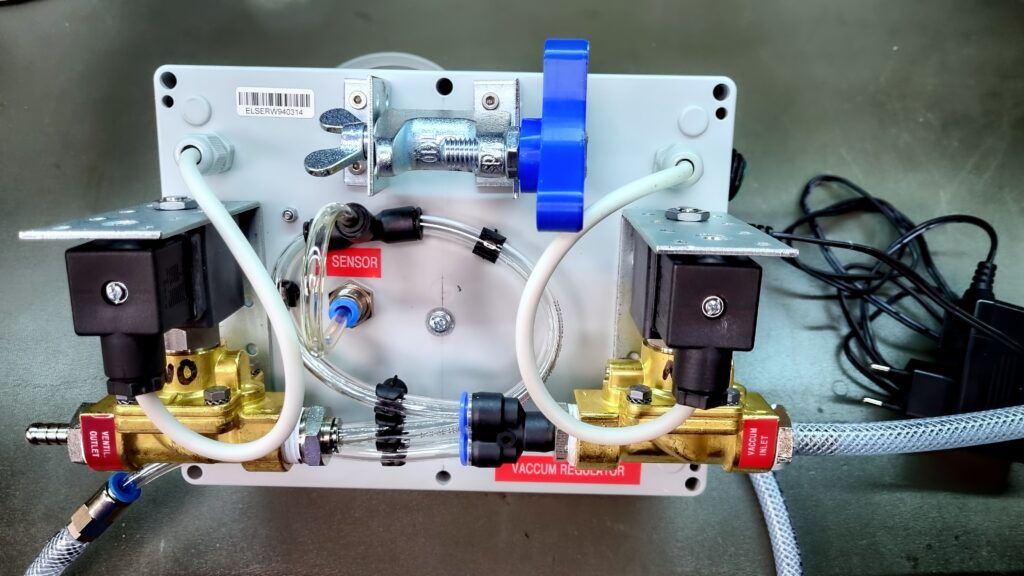
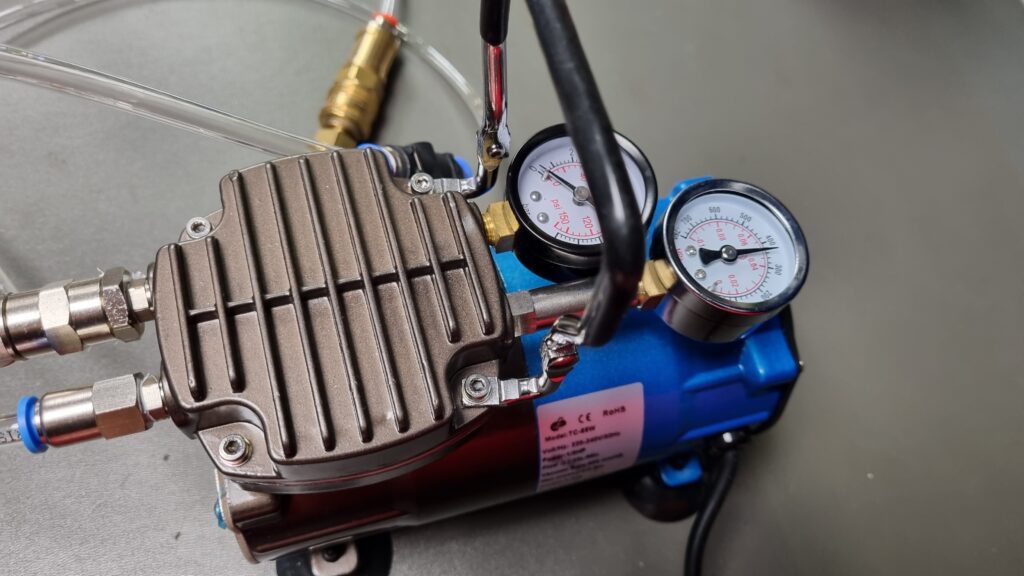
Regulator podciśnienia – pneumatyka
Działanie
Parametrem wejścia procesu regulacji jest pomiar ciśnienia w układzie, zrealizowany na czujniku elektronicznym. Pozostały parametr dotyczy wartości histerezy i jest zadawany przez operatora z użyciem enkodera manualnego umieszczonego na panelu przednim urządzenia. Na panelu tym umieszczone są również przyciski służące do zmiany trybów pracy oraz kontrolki sygnalizujące bieżący stan urządzenia. Elementami wykonawczymi sterownika są dwa elektrozawory: podciśnienia i przewietrzania, które są umieszczone z tyłu obudowy regulatora.
Regulator podciśnienia, panel sterowniczy
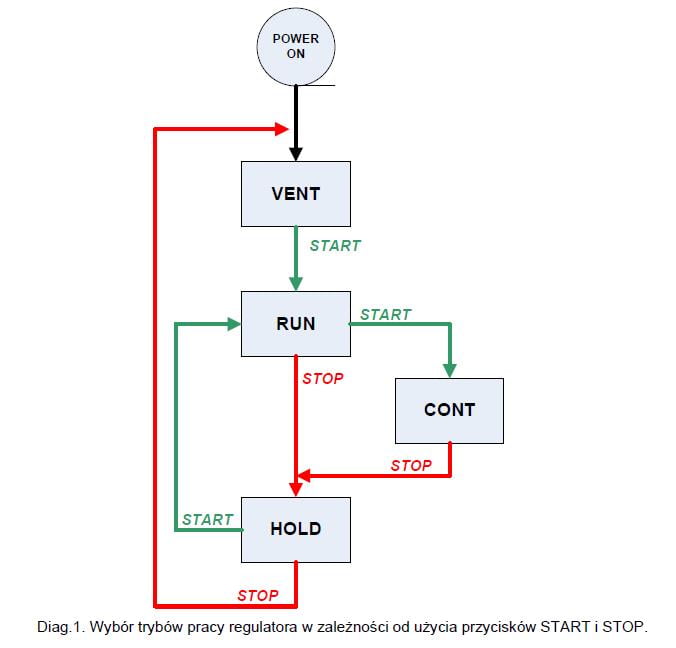
Urządzenie pracuje w czterech trybach pracy:
VENT (tryb wentylacji) – ciśnienie w układzie pneumatycznym jest wyrównane do ciśnienia atmosferycznego. Jest to tryb pracy regulatora aktywny po włączeniu zasilania,
RUN (tryb automatycznej regulacji) – aktywna praca regulatora, tzn. podciśnienie dąży do wartości zadanej z uwzględnieniem histerezy.
CONT (tryb kontynuacji) – regulator pracuje w trybie ciągłym, tzn. otwarty jest zawór podciśnienia przy zamkniętym zaworze wentylacyjnym. Podciśnienie układu dąży do maksymalnego możliwego do osiągnięcia poziomu.
HOLD (tryb zatrzymania) – w trybie tym zamknięte są obydwa zawory, podciśnienie układu przyjmuje wartość constans.
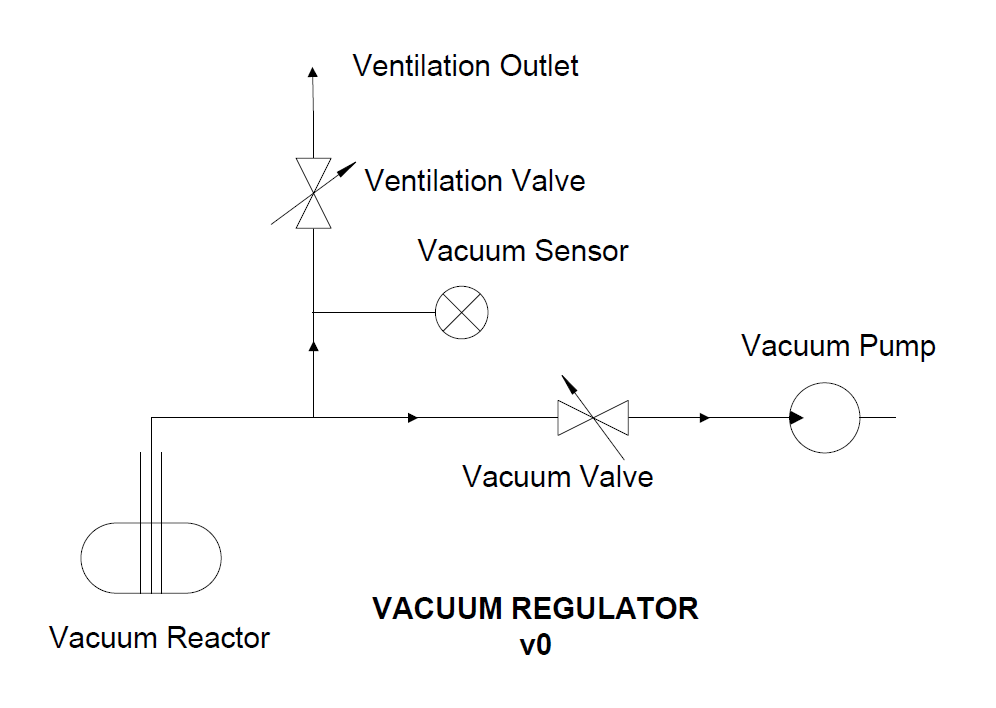
Schemat pneumatyczny
Schemat pneumatyczny urządzenia został przedstawiony poniżej.
Parametry Techniczne
• Użyteczne ciśnienie robocze: 0…750mmHg (0…1000mbar), • Maksymalne ciśnienie układu: 2 bar • Temperatura pracy czujnika: -20…85st.C • Dokładność czujnika pomiarowego: +/- 0,25…1% • Rozdzielczość odczytu ciśnienia i zadawania parametrów: 1mmHg (zakres: 1…750mmHg) • Rodzaj procesu regulacji: PI • Zasilanie urządzenia: 24VDC, min.2A • Stopień ochrony: IP63 • Mocowanie: zacisk do zamocowania na pionowej rurce z regulacją pochylenia • Króćce wylotowe: na przewód pneumatyczny o średnicy wewn. Ø8mm • Pamięć parametrów po wyłączeniu zasilania
Testowanie
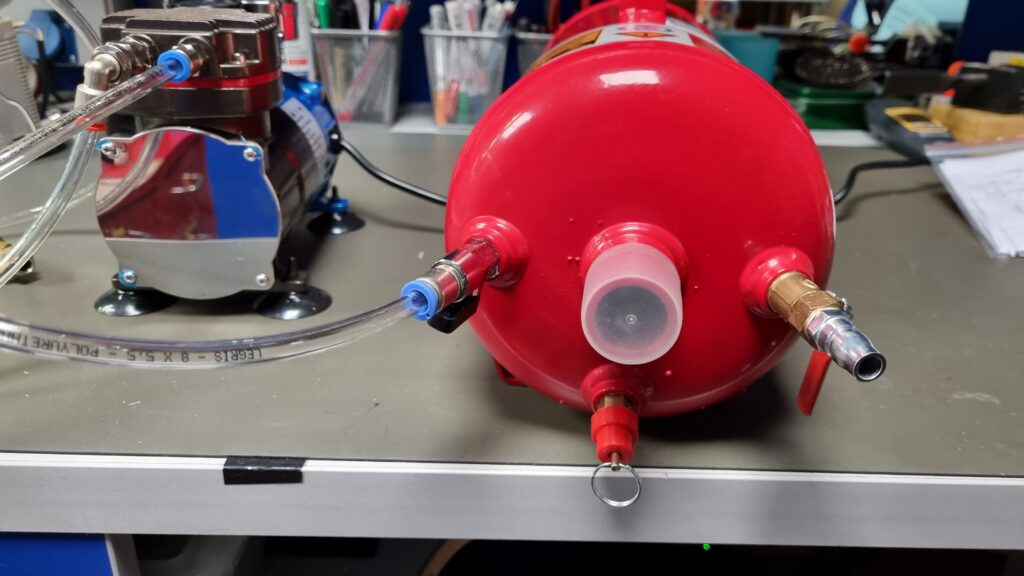
Układ pneumatyczny do sprawdzania, serwisu i kalibracji regulatora podciśnienia.
Firma „ELEKTRONIKA SERWIS” projektuje i wytwarza urządzenia elektroniczne na zamówienie Klienta, w tym regulatory ciśnienia i podciśnienia. Wykonujemy również naprawy takich regulatorów.
Projekt „Uniwersalny Interfejs Inwerterów” powstał w celu dostosowania parametrów wejść falowników do wymagań sterowania. Może on być także zastosowany jako przekaźnik z izolacją galwaniczną w dowolnych urządzeniach.
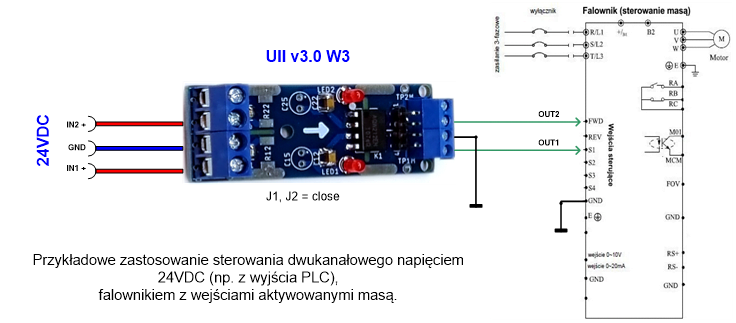
Większość tanich, prostych falowników posiada możliwość sterowania „masą” lub „zasilaniem” (tzn. aby wymusić stan aktywny na wejściu takiego urządzenia, należy zewrzeć wejście do masy, bądź zasilania udostępnionego na osobnych zaciskach inwertera).
Gdyby jednak falownik z taką ograniczoną możliwością sterowania musiał być zasterowany potencjałowo np. z wyjść sterownika, gdzie pojawia się w stanie aktywnym potencjał zasilania sterownika (lub wyjście sterownika zwierane jest na jego masę), nieodzownym staje się zastosowanie interfejsu, który pośredniczyłby pomiędzy potencjałem sterownika a napięciem falownika i odpowiednio je separował, jednocześnie przenosząc impulsy sterowania.
Zastosowanie
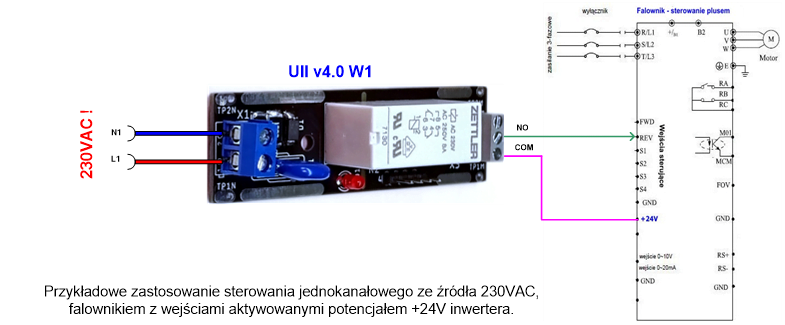
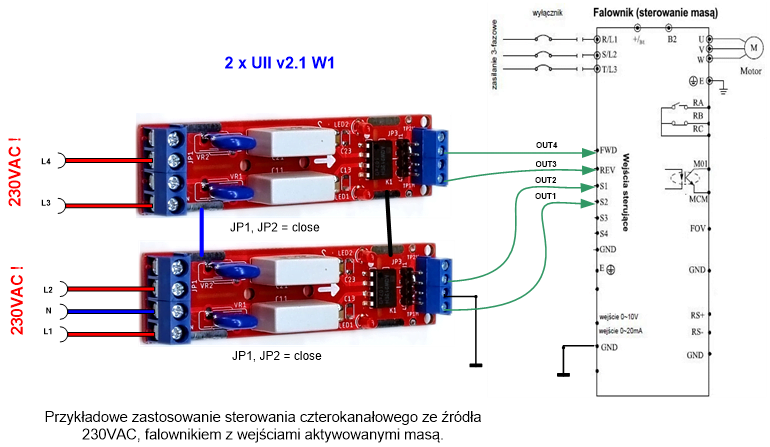
W opisanym wyżej przypadku doskonale sprawdza się nasz UII, który występuje w wielu wersjach, tak aby była możliwość dopasowania go do właściwego poziomu napięć sterujących. I tak na przykład wykonania UII oznaczone jako „W1” umożliwiają sterowanie wprost napięciem sieci jednofazowej 230VAC a pozostałe oferują możliwości sterowania napięciami zarówno stałymi, jak i przemiennymi w szerokich zakresach.
Wersje i Wykonania
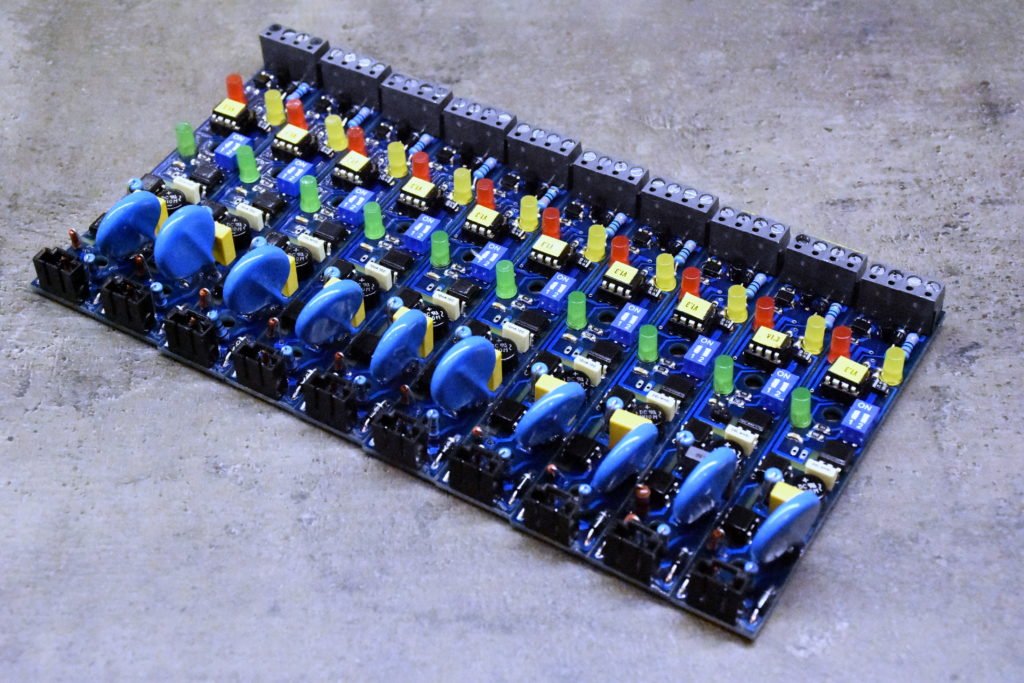
Wszystkie wersje płytek można łączyć w bloki, tak aby uzyskać dowolną ilość niezależnych kanałów sterowania, które w razie potrzeby mogą być połączone np. masami. Dodatkowo wersje V2.1 i V3.0 są dwukanałowe, tzn. każda płytka posiada dwa niezależne kanały sterowania, które mogą być ze sobą połączone np. masami. Wersja V4.0 jest jednokanałowa.
Zaprojektowany i produkowany przez nas „Uniwersalny Interfejs Inwerterów” jest dostępny w trzech zasadniczych wersjach i wielu wykonaniach (patrz Tabela 1).
Opis wersji UII V2.1 i V3.0
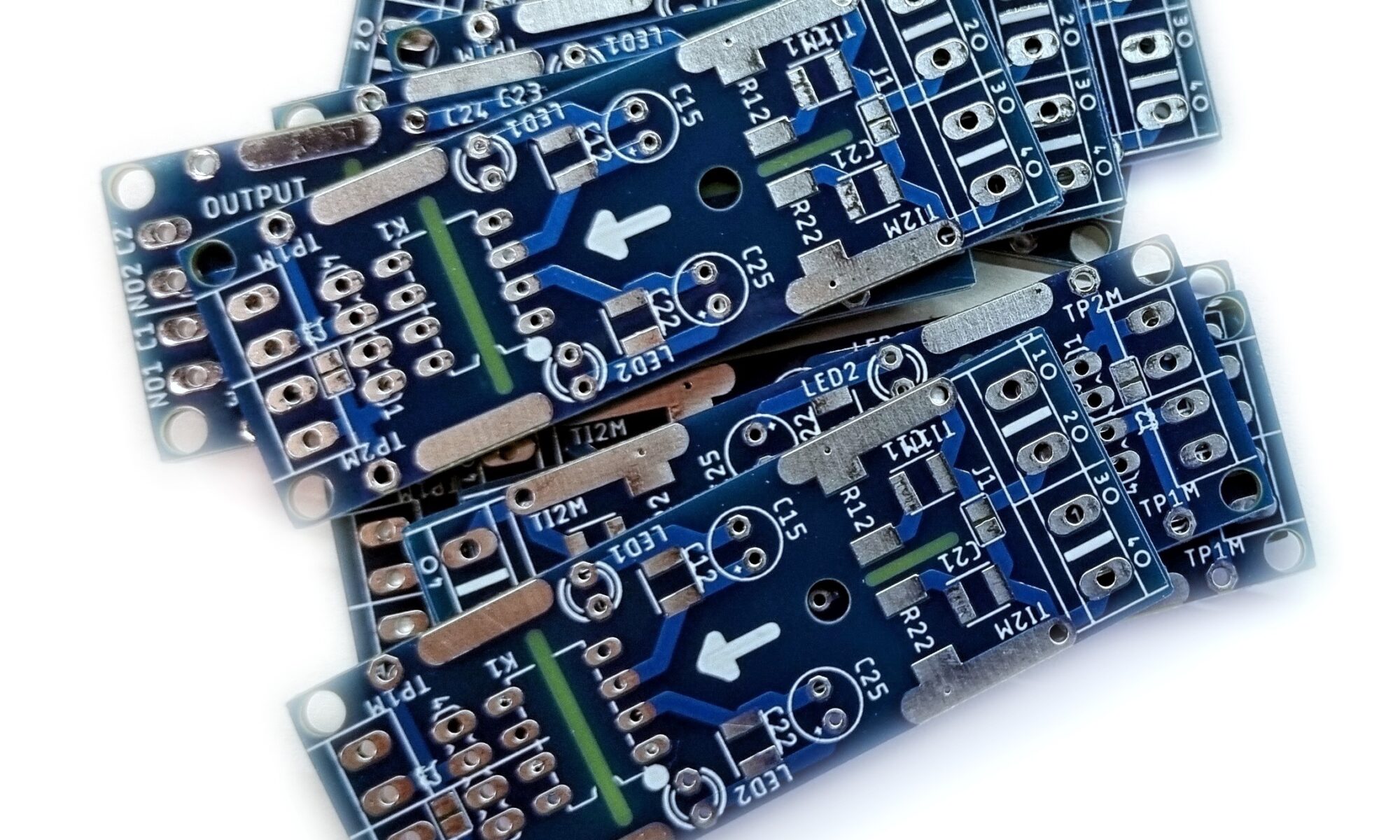
Gotowe do zastosowania wersje UII v2.1 & v3.0
W uproszczeniu wersje UII V2.1 i V3.0, to interfejsy wykonane w oparciu o elementy optyczne, dzięki czemu uzyskuje się relatywnie duże szybkości przełączania i bardzo dobrą izolację obwodu sterującego od obwodu wykonawczego, czyli wejść inwertera. Wersja V3.0 jest zminiaturyzowaną, niskonapięciową odmianą wersji V2.1.
Wersje V2.1 i V3.0 są dwukanałowe. Każda płytka posiada dwa niezależne kanały sterowania, które mogą być ze sobą połączone np. masami.
Opis wersji UII V4.0
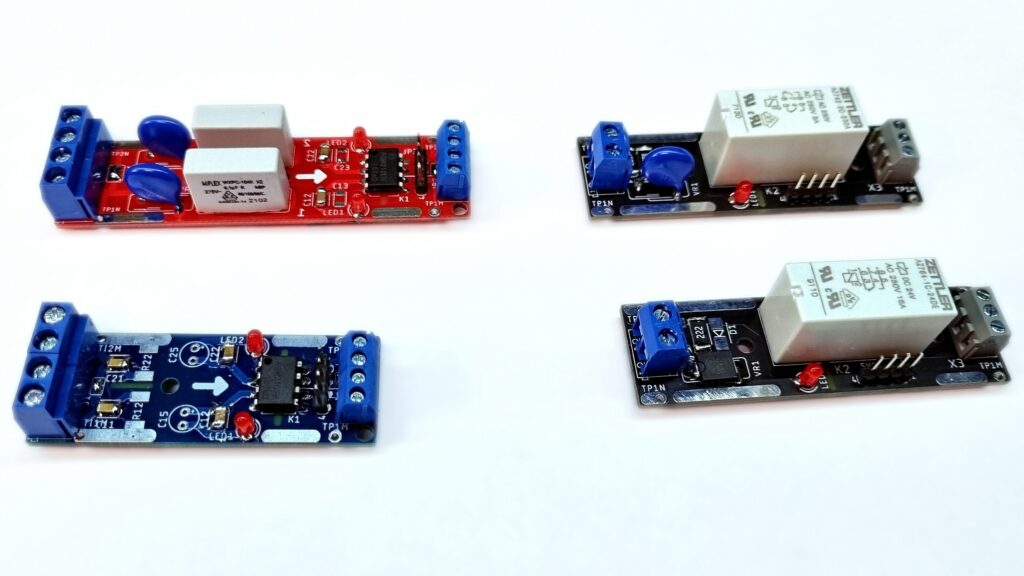
Gotowa do zastosowania wersja v4.0 w wykonaniach W1 i W2
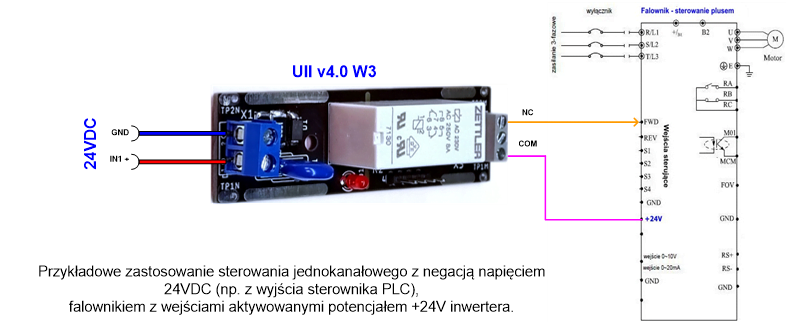
Wersja V4.0 we wszystkich jej wykonaniach napięciowych oparta jest o elektromechaniczny element przełączający (przekaźnik), który pozwala m.in. na uzyskanie negacji sterowania (wymuszenie potencjału na wejściu falownika, przy braku sygnału sterującego na jego wejściu), niestety odbywa się to kosztem prędkości przełączania i ograniczoną w stosunku do wersji optycznej, ilością przełączeń.
UII w wersji V4.0 są jednokanałowe. Każda płytka posiada jeden kanał sterowania.
Wykonania
Wykonania są oznaczone jako W1 do W6 określają rodzaj i zakres napięć sterujących (wejściowych) interfejsów.
Wersja v2.1 w wykonaniu W1
Wersja v3.0 w wykonaniu W2
Wykonanie „W1” dopuszcza sterowanie w zakresie napięć sieci jednofazowej 230VAC (wykonanie to występuje zarówno w wersji V2.1, jak i V4). Interfejsy oznaczone jako „W2” i „W3” dedykowane są do sterowania napięciami 24V, odpowiednio: napięciem przemiennym i stałym. Sterowania w wersjach „W4” i „W5” obejmują zakres napięć 12VAC i 12VDC, zaś wersje oznaczone jako „W6” są wersjami specjalnymi, wykonywanymi na zapotrzebowanie Klienta i mogą obejmować bardzo szeroki zakres napięć i różne rodzaje sterowania.
Przykłady zastosowania
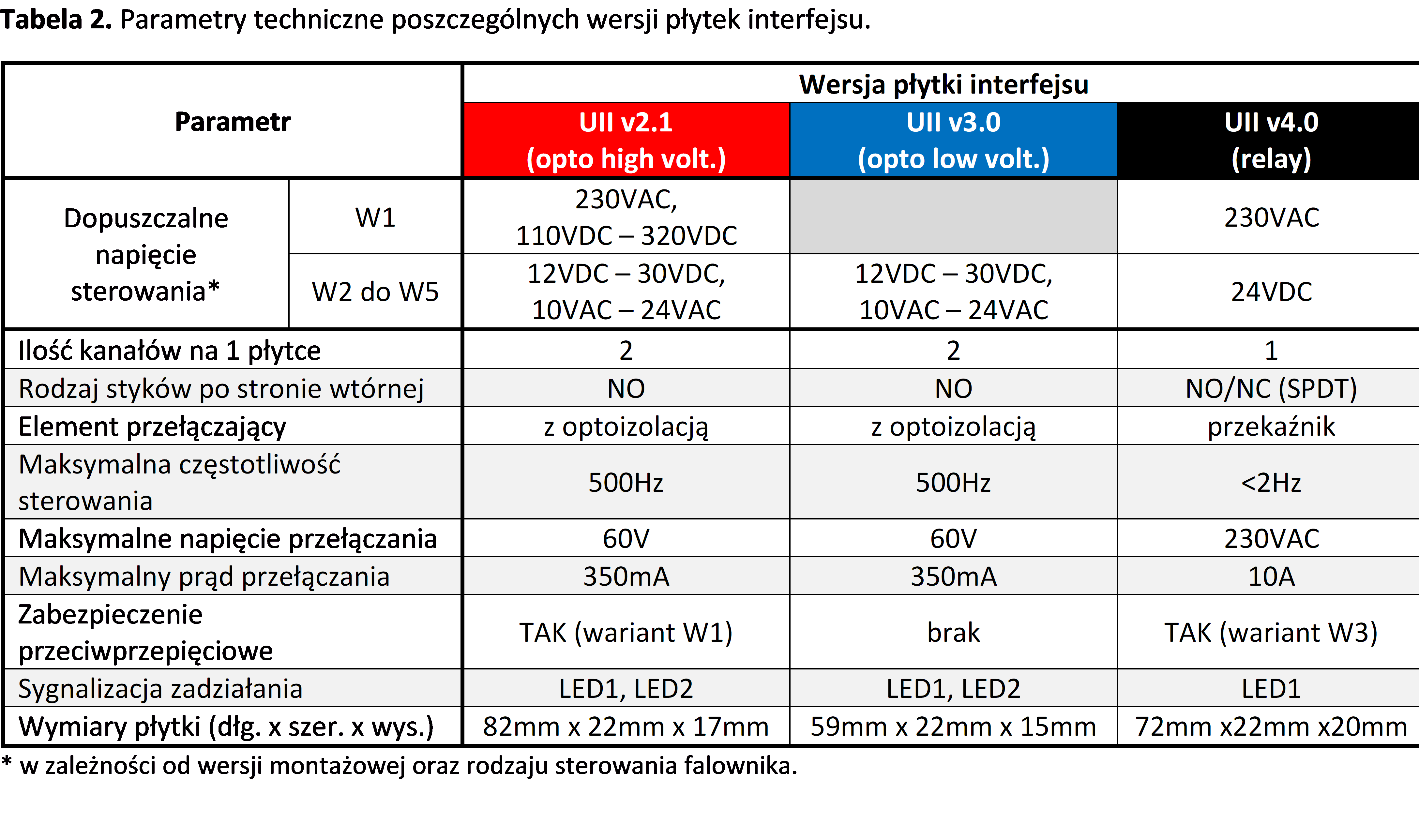
Każda płytka interfejsu UII posiada możliwość złączenia kaskadowego w celu zwiększenia ilości kanałów sterowania. Tak złączone płytki zachowują możliwość połączeń wspólnych (np. wspólnej masy). Złączenie kaskadowe może być realizowane poprzez połączenie cyną odsłoniętych, pobielonych pól lutowniczych (jak to widać na rysunku poniżej).
Dane Techniczne
W celu zakupu wybranego interfejsu lub otrzymania szczegółowych informacji dotyczących zastosowania UII w konkretnym rozwiązaniu układowym, prosimy o Kontakt lub FB: ELSERW.PL albo z dystrybutorem AUTOMEL.PL
Sterowników oświetlenia jest chyba milion, zwłaszcza odkąd pojawiły się diody LED, a z nimi tzw. paski lub taśmy LEDowe. Ten jednak sterownik umożliwia sterowanie z pilota radiowego, będąc przy tym bardzo elastycznym i uniwersalnym. Jest on oparty na module Arduino NANO, dzięki czemu używając środowiska Arduino IDE, można łatwo modyfikować jego oprogramowanie lub szybko napisać zupełnie nowe.
Uniwersalność przedstawionego rozwiązania polega na tym, że w zależności od konfiguracji i obsadzenia elementami płytki drukowanej oraz dzięki wgraniu odpowiedniego oprogramowania do modułu procesora, można uzyskać szereg bardzo różnych funkcjonalności, jak na przykład:
Sterowanie jedno lub dwukanałowe ON/OFF oświetleniem na napięcie 230VAC (np. żarówki LED 230V lub inne odbiorniki mocy zasilane napięcie sieciowym). Elementami sterowania mocy są tutaj przekaźniki elektromechaniczne, które mogą także być zastąpione przekaźnikami elektronicznymi SSR (podraża to jednak koszt części).
Sterowanie jedno lub dwukanałowe ON/OFF oświetleniem na napięcie 12VDC (np. białe taśmy LED). Elementami sterującymi mocy są w tym wariancie tranzystory MOS.
Sterowanie jedno, dwu, lub trzykanałowe oświetleniem na napięcie 12VDC (np. taśmy LED RGB) . Tutaj również elementami mocy są tranzystory MOS.
We wszystkich powyższych wariantach dostępne są takie funkcjonalności jak:
A. Zdalne sterowanie kanałami oświetlenia przy pomocy pilota (pilotów) RF 433MHz (lub innego typu o podobnych sygnałach wyjściowych)
B. Możliwy jest wybór jednego z dwóch lub, w zależności od oprogramowania, również i z trzech pilotów różnych pilotów RF
C. Każdy z pilotów może wysyłać do sześciu różnych kodów odzwierciedlających jego przyciski. Każdemu z przycisków można przypisać dowolny kanał lub sterowanie grupowe (włącz lub wyłącz wszystkie kanały
Dla wariantu 2. i 3. sterownik realizuje funkcję DIMMING (ściemniacz), co pozwala regulować natężeniem sterowanego oświetlenia. Natomiast wariant 3. ma również oprogramowany system zmiany barw, specjalnie w przypadku gdy kanały wyjściowe są przyłączone do taśmy LEDowej typu RGB.
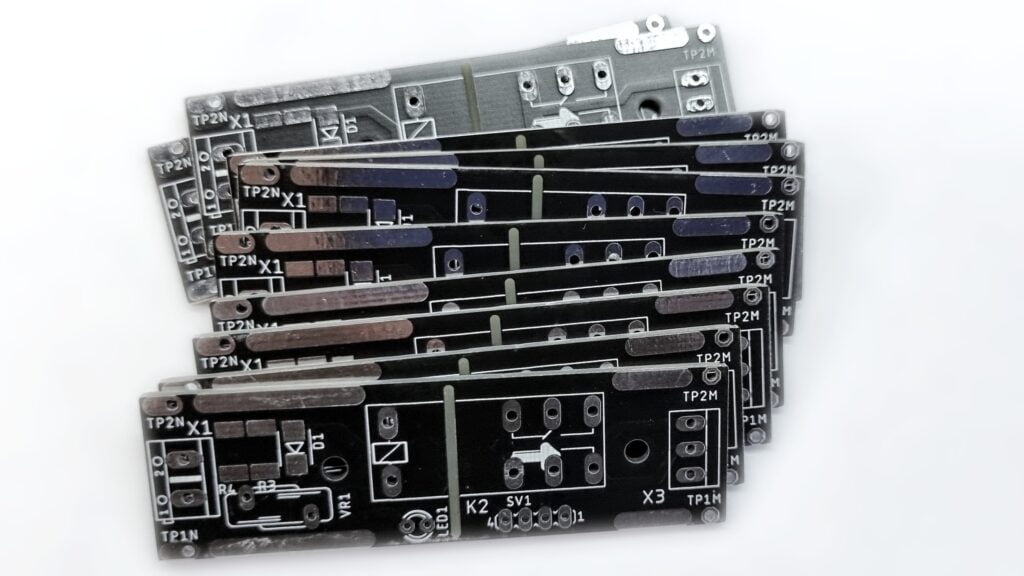
To wszystko jest możliwe do realizacji na jednej płytce PCB o roboczej nazwie RF Sniffer v3.1.
Poniżej znajduje się schemat obejmujący wszystkie warianty zrealizowane na płytce v3.1
Kliknij aby pobrać aktualną wersję PDF.
Oprogramowanie w postaci szkicu dla Arduino IDE można pobrać poniżej
Wersja v1.1 (dla PCB v3.0) obsługująca dwa kanały z przekaźnikami lub tranzystorami MOS, umożliwia opcje ON/OFF dla obydwóch kanałów. RF Sniffer v1.1
Wersja v3.4 (dla PCB v3.0) obsługująca dwa kanały z tranzystorami MOS, umożliwia opcję Fading (dimming) dla obydwóch kanałów. Program napisany z użyciem przerwań wewnętrznych od timera. RF Sniffer v3.4
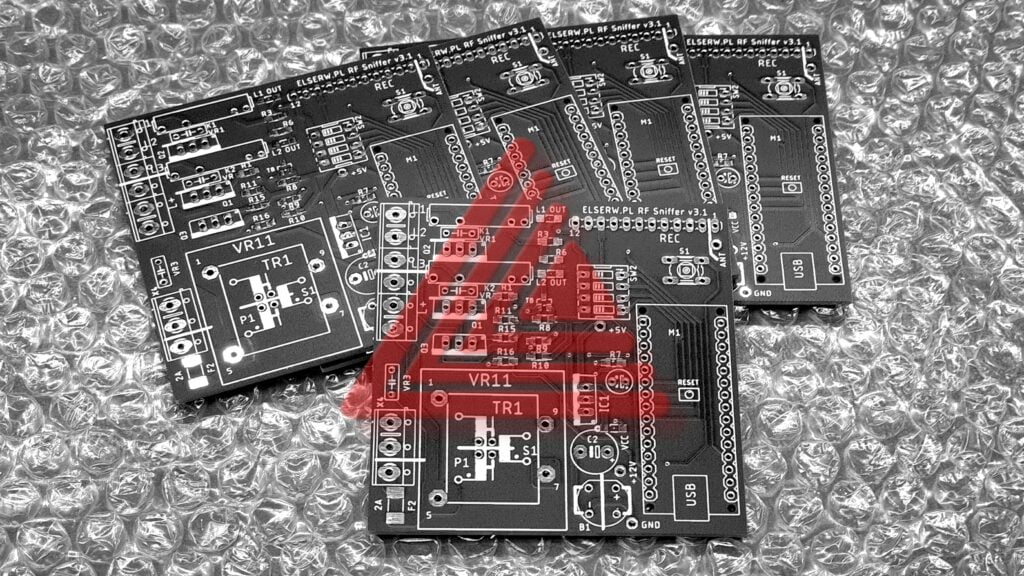
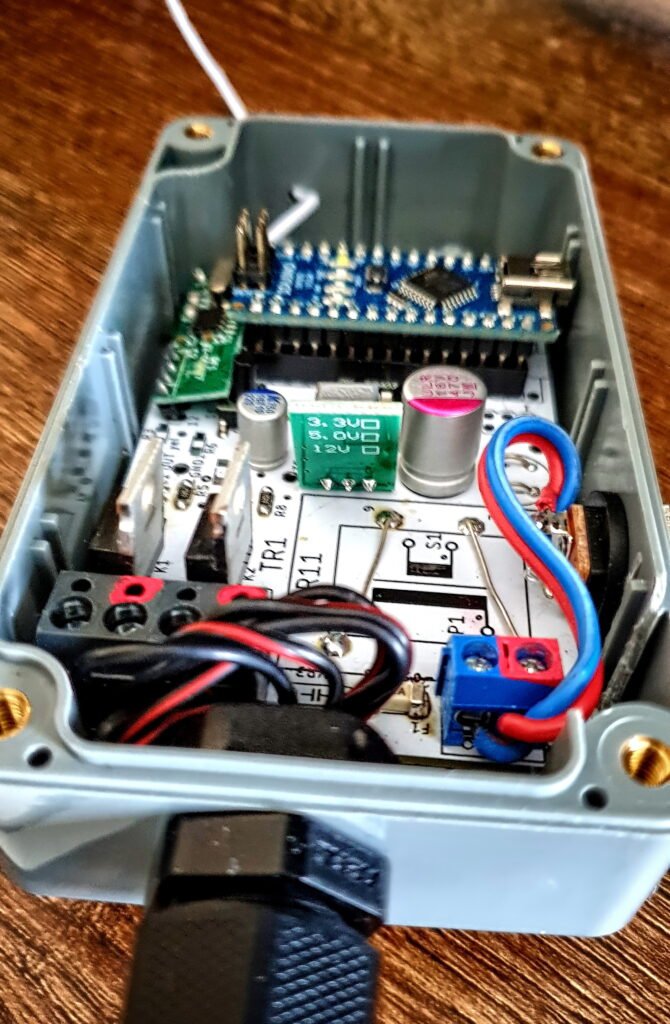
Zmontowany sterownik na starszym modelu płytki w wersji v2.0 z zasilaniem zewnętrznym 12VDC i tranzystorami MOS.
Pilot radiowy RF zastosowany w projekcie (można użyć dowolnego pilota z nadajnikiem 433MHz)
Płytki w wersji V3.0 oraz poprzednich są dostępne do zakupu w naszej firmie, także w wersji zmontowanej i uruchomionej.
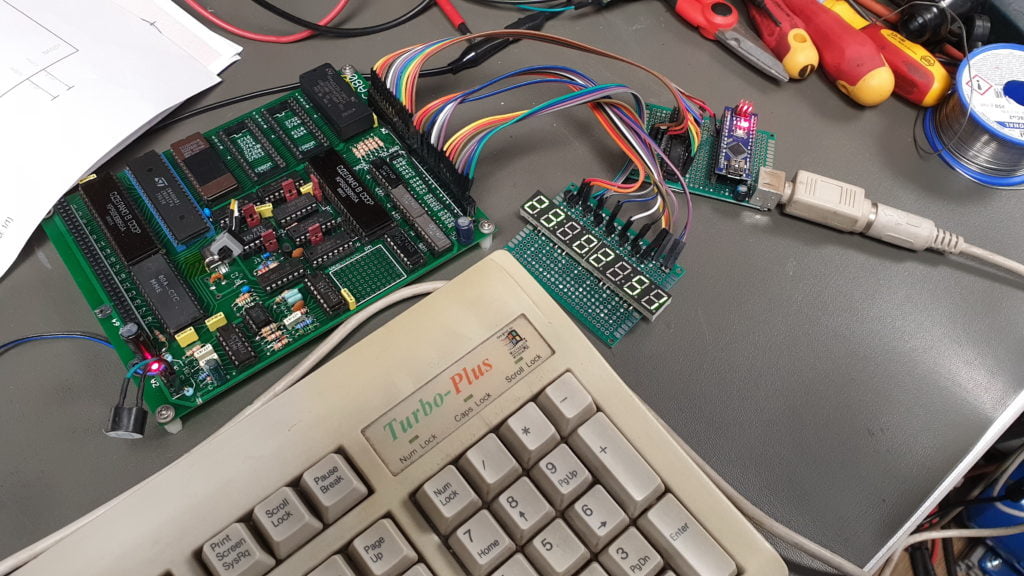
Projekt interfejsu komunikacyjnego umożliwiającego współpracę klawiatury PC posiadającej interfejs PS/2 z mikrokomputerem retro CA80.
Autor: Sławomir Jurkiewicz
Mikrokomputer CA80 z interfejsem i klawiaturą PS/2
Korzystając z zimnej i deszczowej w tym roku majówki, chciałbym zaprezentować projekt interfejsu mojego autorstwa. Od niedawna stałem się bowiem szczęśliwym posiadaczem i użytkownikiem mikrokomputera retro o nazwie „CA80”, zaprojektowanego przez polskiego inżyniera Stanisława Gardynika i wylansowanego w latach 80tych ubiegłego wieku przez jego firmę MIK.
Więcej o moich perypetiach z CA80 można przeczytać TUTAJ.
Założenia projektu
Interfejs ma na celu zastąpienie oryginalnej klawiatury matrycowej standardową klawiaturą dla komputerów PC posiadającą interfejs PS/2 i złącze mini-DIN.
Zarówno klawiatura PC, jak i mikrokomputer CA80 pozostają oryginalne, brak w nich w zasadzie jakichkolwiek modyfikacji (z wyjątkiem wyprowadzenia zasilania oraz sygnału resetu na złącze klawiatury [ZK] mikrokomputera CA80 – patrz schemat ideowy interfejsu).
Interfejs wykonany jest na bazie ARDUINO w wersji NANO w formie dosyć kompaktowej płytki i zawiera ogólnodostępne części elektroniczne.
Wszystkie sygnały interfejsu są pobierane ze złącza klawiatury (ZK) mikrokomputera CA80.
Oprogramowanie ARDUINO jest uproszczone w maksymalnym stopniu a ilość zajętych obsługą interfejsu linii danych ARDUINO ograniczona do niezbędnego minimum.
Idea działania interfejsu może być opisana w następujących krokach prostego algorytmu:
Oczekiwanie mikrokontrolera Arduino na przyciśnięcie klawisza na klawiaturze PC.
Pobranie danych (kodu naciśniętego klawisza) z interfejsu PS/2 klawiatury.
Zdekodowanie kodu klawiatury PC.
Odczekanie aż na wyjściu przeczesywania matrycy przycisków CA80 pojawi się właściwy sygnał. Wyjścia KA, KB, KC, KD złącza klawiatury CA80 (ZK) są, poprzez koder sprzętowy IC2, sprawdzane w pętli programu Arduino i na bieżąco porównywane z odczytanym i zdekodowanym kodem uprzednio pobranym z klawiatury PC.
Pojawienie się poprawnego sygnału j.w. powoduje wygenerowanie przez interfejs odpowiedzi logicznej, która po zdekodowaniu sprzętowym (IC1) przekazywana jest do CA80 symulując zwarcie styków przycisku symulowanej klawiatury matrycowej.
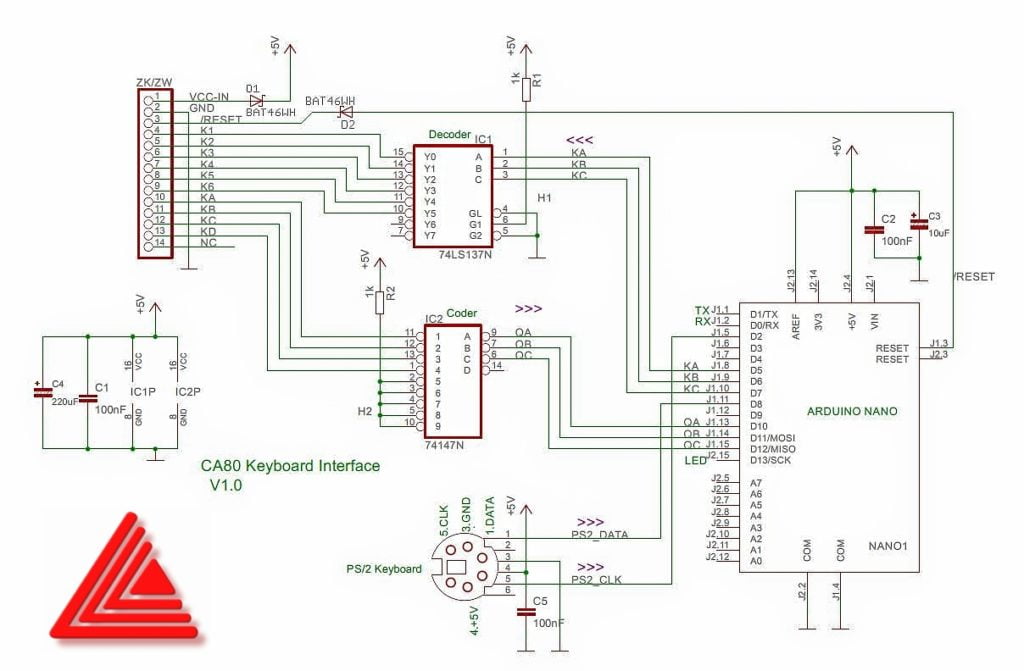
Analizując schemat, możemy wyróżnić na nim 3 współpracujące ze sobą bloki funkcjonalne: koder (IC2), dekoder (IC1), sterownik (Arduino Nano).
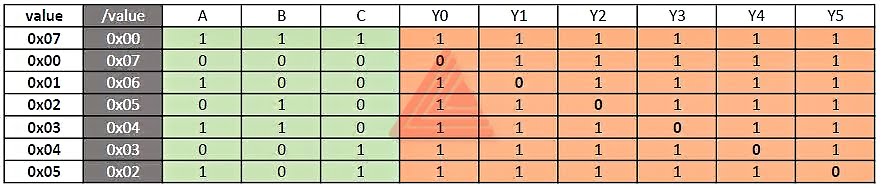
Podstawowym zadaniem kodera opartego o układ cyfrowy 74147 jest zamiana sygnałów przeczesywania matrycy CA80 z postaci 1z4 na postać liczby z przedziału 0x03 do 0x07 (patrz tablica prawdy kodera 74147). Takie rozwiązanie prócz zaoszczędzenia jednego wejścia Arduino, daje również możliwość elektrycznego buforowania sygnałów z interfejsu klawiatury CA80 zmniejszając jego obciążenie.
Tablica prawdy kodera 74147
Zgodnie z tablicą prawdy układu kodera 74147 zarówno sygnały na wejściu jak wyjściu tego układu są zanegowane, czyli stanem aktywnym jest poziom niski „L”.
Jest możliwe pominięcie układu kodera 74147, w takim przypadku sygnały wyjściowe przeczesywania klawiatury (KA do KD) należy podłączyć bezpośrednio na wejścia modułu kontrolera Arduino. W takim przypadku konieczna jest m.in. zmiana tablicy kodowania zawartej w programie interfejsu (funkcja getKeyString() ).
Dekoder IC1 oparty na układzie 74137 zamienia sygnały sterujące z modułu Arduino na postać 1z6. Rozwiązanie takie upraszcza sterowanie i redukuje ilość zajętych wyjść Arduino z 6 do 3.
Tablica prawdy dekodera 74137
Tablica prawdy kodera 74137 pokazuje, że jego sygnały wejściowe nie są zanegowane (aktywny jest tutaj stan wysoki „H”), w przeciwieństwie do sygnałów wyjściowych, gdzie aktywny jest niski stan sygnału – „L”.
Program dla Arduino
Sketch dla Arduino w spakowanym pliku *.INO jest do pobraniaTUTAJ.
//------------------------------------------------------------------------------------------------------------------------
// CA80 PS2 Keyboard Transcoder v2.3P (wersja produkcyjna z polskimi komentami
// PCB v1.0 (Arduino NANO)
//------------------------------------------------------------------------------------------------------------------------
// Autor: Sławomir Jurkiewicz (elserw@elserw.com)
// Na podstawie: "Podłączamy stara klawiaturę do Arduino" by Kamil (https://starter-kit.nettigo.pl/author/kamil/feed/)
// oraz "Zdalne sterowanie klawiaturą" by Natasza Biecek (http://bienata.waw.pl/ca808.php)
//------------------------------------------------------------------------------------------------------------------------
//Definicja funkcji pinów Arduino
#define CLK 2 //inp
#define DAT 8 //inp
#define QA 10 //inp
#define QB 11 //inp
#define QC 12 //inp
#define LED 13 //out
#define KA 5 //out
#define KB 6 //out
#define KC 7 //out
//Deklaracja i zerowanie bufora obsługi danych z klawiatury PC PS/2
const int BUF_SIZE = 11;
bool buffer[BUF_SIZE] = {0};
//Pozostałe zmienne dla procedur PS/2
int pos = 0;
bool ignoreNext = false;
unsigned long lastRead = 0;
int caCode = 0; //Bieżący kod naciśniętego klawisza wysyłany do CA80
void setup() {
//Komunikacja monitora portu szeregowego Arduino do celów debugowania programu
//Wszystkie linijki kodu zaczynające się od "Serial." można usunąć w gotowym programie
Serial.begin(9600);
Serial.println("CA80 PS2 Keyboard Transcoder v2.3P");
Serial.println("Ready...");
//Ustawienie funkcji zdefiniowanych pinów w Arduino
//Wejścia
pinMode(CLK, INPUT);
pinMode(DAT, INPUT);
pinMode(QA, INPUT);
pinMode(QB, INPUT);
pinMode(QC, INPUT);
//Wyjścia
pinMode(LED, OUTPUT);
pinMode(KA, OUTPUT);
pinMode(KB, OUTPUT);
pinMode(KC, OUTPUT);
digitalWrite(LED, LOW); //Wygaszenie LEDa na płytce Arduino.
PORTD = 0xE0; //Ustawienie "1" na pinach D5,D6,D7 (KA, KB, KC). Dekoder IC1 ma wszystkie wyjścia Y0 do Y7 ustawione na "1"
delay(1000); //Oczekiwanie na zadziałanie klawiatury PS/2 po włączeniu zasilania
attachInterrupt(digitalPinToInterrupt(CLK), readData, FALLING); //Ustawienie przerwania od wyjścia zegarowego CLK klawiatury PS/2 (reakcja na zbocze dodatnie sygnału CLK)
}
//Główna pętla programu - wczytanie, dekodowanie klawisza z PS/2 oraz zakodowanie go i wysłanie do CA80 (poprzez ustawienie w odpowiednim momencie wyjść dekodera IC1)
void loop() {
if(pos != 0 && millis() - lastRead > 1000) { //oczekiwanie na zapełnienie bufora klawiatury, którego zawartość jest kompletowana w przerwaniu (procedura "readData").
pos = 0;
}
if(pos == 11) { //bufor PS/2 kompletny, wczytano kod klawisza z klawiatury PS/2
pos = 0;
int keyCode = getKeyCode(buffer); //Obróbka danych z bufora. W zmiennej "keyCode" jest kod klawisza z PS/2
if(ignoreNext) {
ignoreNext = false;
return;
}
if(keyCode == 0xF0) { //Ignoruj kody puszczenia klawisza na PS/2
ignoreNext = true;
return;
}
//Wysłanie na port szeregowy terminala Arduino informacji o kodzie i nazwie wciśniętego przycisku
Serial.print("PS/2=0x");
Serial.print (String(keyCode, HEX));
Serial.print (" ");
String keyString=getKeyString(keyCode); //Zdekodowanie kodu klawisza PS/2 na jego nazwę (przy okazji w zmiennej "caCode" znajduje się kod klawisza dla CA80)
Serial.print(keyString);
if(caCode>0) {
//Wysłanie na terminal Arduino informacji o kodzie dla CA80 wciśniętego klawisza na klawiaturze PS/2
Serial.print (" CA80=0x");
Serial.print (String(caCode, HEX));
noInterrupts(); //zatrzymanie przwań
sendKey(caCode); //wysłanie do CA80 kodu naciśniętego klawisza
interrupts(); //wznowienie obsługi przerwań
digitalWrite(LED, !digitalRead(LED)); //zmiana świecenia LED - sygnalizuje wczytanie z klawiatury i wysłanie do CA jednego kodu
Serial.print (" ");
pos = 0; //po włączeniu przerwań bufor klawiatury PS/2 będzie czytany od nowa
}
Serial.println ("");
}
}
void sendKey(int caCode) {
//wysłanie kodu naciśniętego klawisza do CA80 (kod znajduje się w zmiennej "caCode")
//https://www.arduino.cc/en/Reference/PortManipulation
int caCodeT = (caCode & 0xF0) >> 4; //modyfikacja zdekodowanego kodu klawisza
for (int i = 0; i <= 20; i++) { //powtórz 20 razy wysłanie klawisza do CA80, aby przechytrzyć debouncing
while (caCodeT!=(PINB & 0x1C) >> 2) { //czytaj porty 10,11,12 (QA, QB, QC) aby ustalić moment kiedy należy ustawić sygnały KA,KB,KC
//pętla oczekiwania na właściwy moment, czyli wystawienie przez CA80 odpowiednich sygnałów KA, KB, KC, KD
}
PORTD = (caCode & 0x07)<<5; //ustaw porty D5,D6,D7 (KA, KB, KC) w celu wysłania kodu do CA80
delayMicroseconds(12); //podtrzymaj ustawienia do czasu kiedy CA80 skończy dekodowanie wysłanych mu danych - czas 12us jest krytyczny dla całego procesu
PORTD = 0xE0; //zapisz "111" do portów D5,D6,D7 w celu wyzerowania (KA, KB, KC)
}
}
void readData() {
//Sczytanie danych z klawiatury PS/2
lastRead = millis();
buffer[pos++ % 11] = digitalRead(DAT);
}
int getKeyCode(bool * buf) {
//Na podstawie danych z bufora funkcja zwraca kod naciśniętego klawisza.
bool parity = 1;
int result = 0;
if(buf[0] != 0) return -1;
if(buf[10] != 1) return -2;
for(int x = 0; x < 8; x++) {
result |= buf[1+x] << x;
if(buf[1+x]) parity = !parity;
}
if(buf[9] != parity) return -3;
return result;
}
String getKeyString(int keyCode) {
//Dekodowanie naciśniętego klawisza na podstawie jego kodu
// przy okazji w zmiennej "caCode" jest ustawiany kod dla CA80
caCode=0;
switch(keyCode) {
case 0x1C: caCode=0x52; return "A";
case 0x32: caCode=0x51; return "B";
case 0x21: caCode=0x64; return "C";
case 0x23: caCode=0x63; return "D";
case 0x24: caCode=0x62; return "E";
case 0x2B: caCode=0x61; return "F";
case 0x34: caCode=0x50; return "G";
//case 0x33: return "H";
//case 0x43: return "I";
//case 0x3B: return "J";
//case 0x42: return "K";
//case 0x4B: return "L";
case 0x3A: caCode=0x60; return "M"; //
//case 0x31: return "N";
//case 0x44: return "O";
//case 0x4D: return "P";
//case 0x15: return "Q";
//case 0x2D: return "R";
//case 0x1B: return "S";
//case 0x2C: return "T";
//case 0x3C: return "U";
//case 0x2A: return "V";
//case 0x1D: return "W";
//case 0x22: return "X";
//case 0x35: return "Y";
//case 0x1A: return "Z";
case 0x45: caCode=0x34; return "0";
case 0x16: caCode=0x33; return "1";
case 0x1E: caCode=0x32; return "2";
case 0x26: caCode=0x31; return "3";
case 0x25: caCode=0x44; return "4";
case 0x2E: caCode=0x43; return "5";
case 0x36: caCode=0x42; return "6";
case 0x3D: caCode=0x41; return "7";
case 0x3E: caCode=0x54; return "8";
case 0x46: caCode=0x53; return "9";
case 0x5A: caCode=0x30; return "ENT"; //"=" <ENTER>
case 0x55: caCode=0x30; return "="; //"=" <ENTER>
case 0x29: caCode=0x40; return "SPC"; //"." <SPACE>
case 0x49: caCode=0x40; return "."; //"."
case 0x05: caCode=0x65; return "F1"; //
case 0x06: caCode=0x55; return "F2"; //
case 0x04: caCode=0x45; return "F3"; //
case 0x0c: caCode=0x35; return "F4"; //
case 0x76: caCode=0x60; return "ESC"; //"M" <ESC>
}
return "";
}
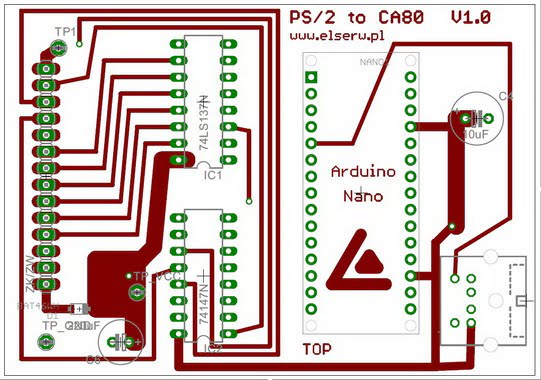
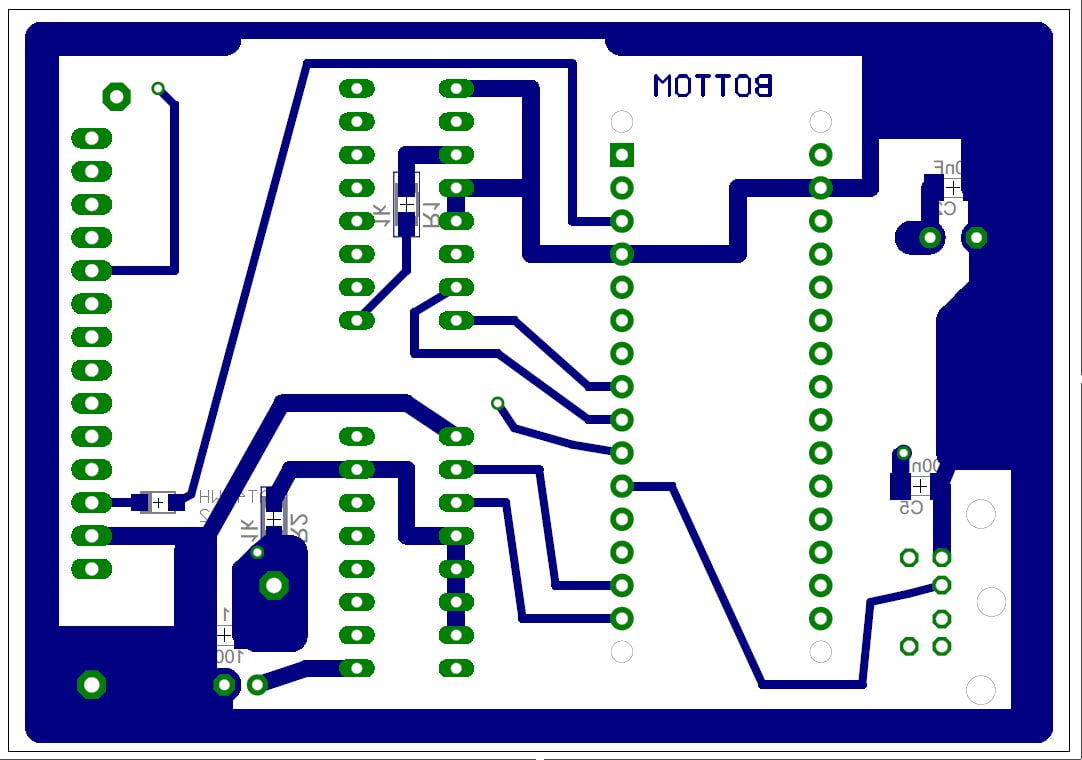
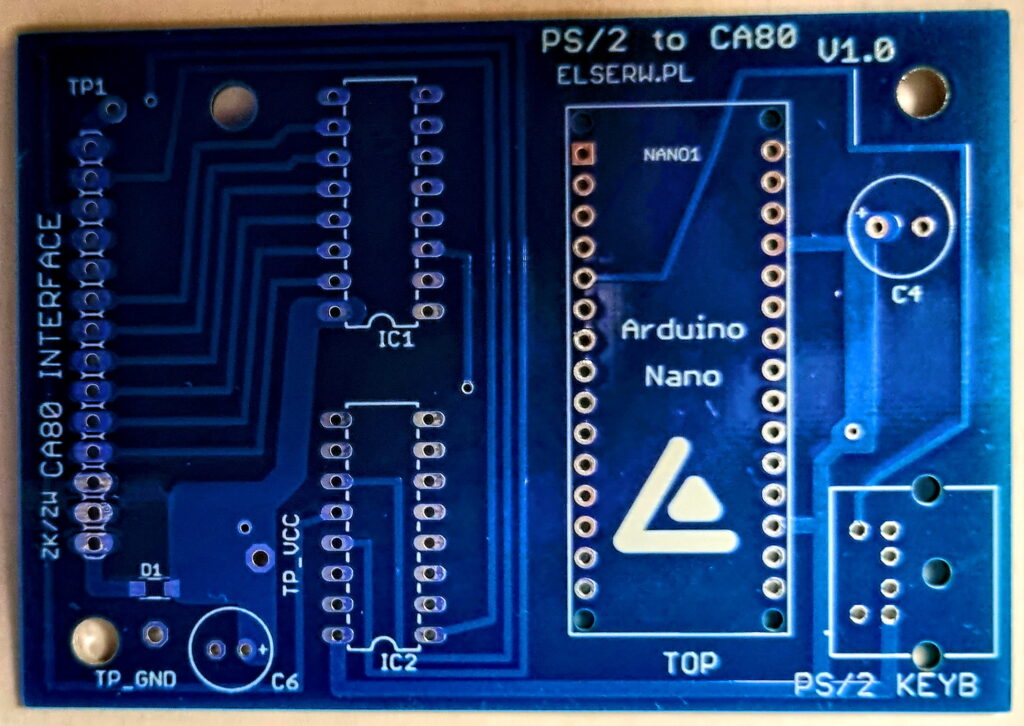
Płytka drukowana
Strona elementów (TOP)Strona połączeń (BOTTOM)
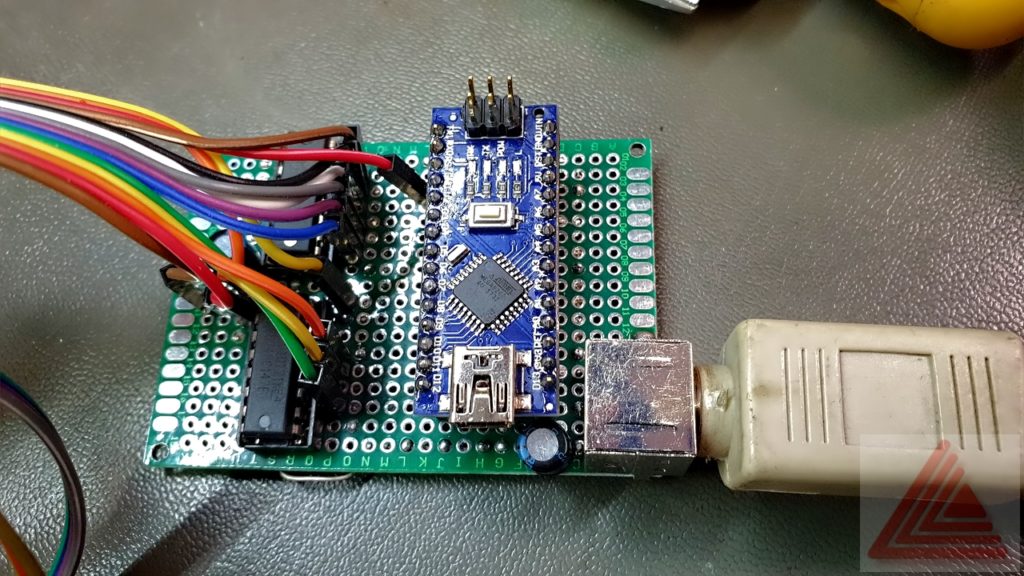
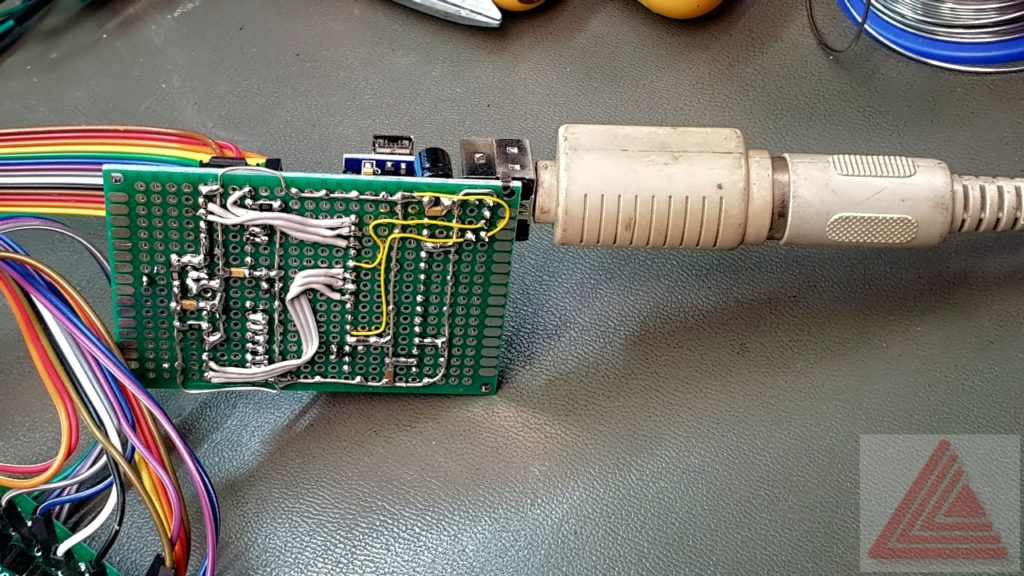
Interfejs w trakcie uruchamiania.
Interfejs w trakcie uruchamiania (strona wierzchnia). Interfejs w trakcie uruchamiania (strona spodnia).
W czasie tworzenia projektu wykorzystano następujące źródła:
… lub powrót do dalekiej przeszłości CA80 or return to a deep past
Mikrokomputer CA80 (bo na swoje czasy na 100% był „mikro”), to pełnowartościowy system procesorowy pracujący pierwotnie pod kontrolą 8-mio bitowego procesora U880 (klon Z80A firmy Zilog), którego głównym przeznaczeniem była nauka programowania mikrokomputerów, ale także elektroniki cyfrowej w ogóle. Został on wymyślony na początku lat 90-tych przez polskiego inżyniera Stanisława Gardynika. Sprzedawany w zestawach do samodzielnego montażu i wspomagany obszerną literaturą autorstwa jego twórcy, która zgromadzona była w kilkunastu dosyć obszernych zeszytach o nazwie „MIK”. Zeszyty te opisywały zarówno podstawy elektroniki, jak i sposób montażu komputerka, jego uruchomienie oraz oprogramowanie. W miarę rozwoju przedsięwzięcia fani doczekali się kilku, może nawet kilkunastu programów użytkowych wraz z adekwatną adaptacją hardware’u.
Krótki opis wersji
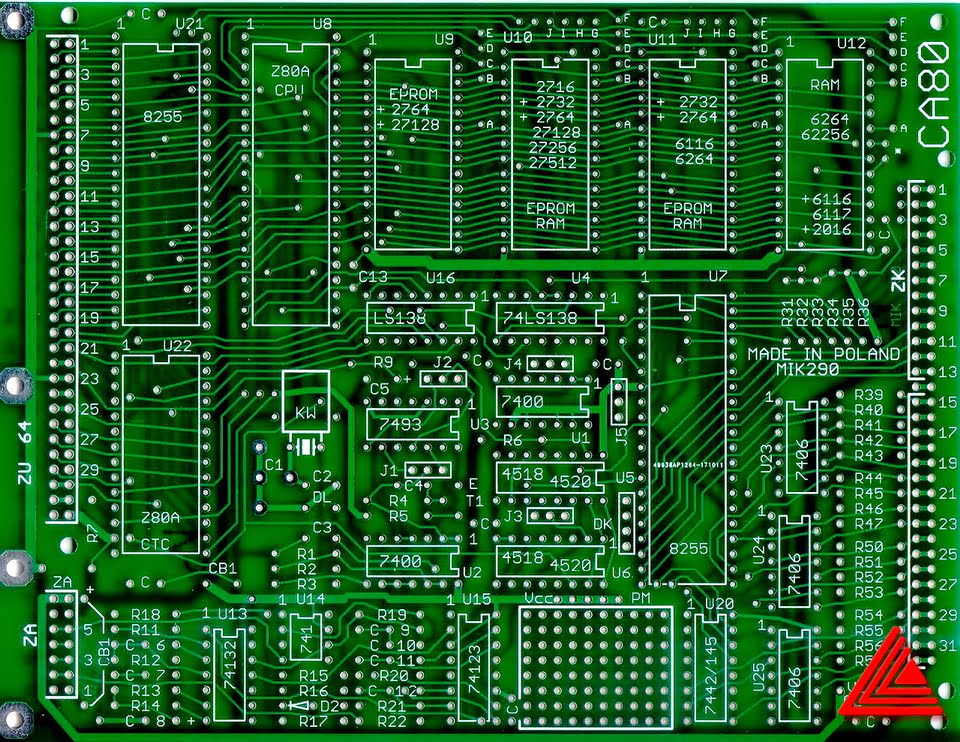
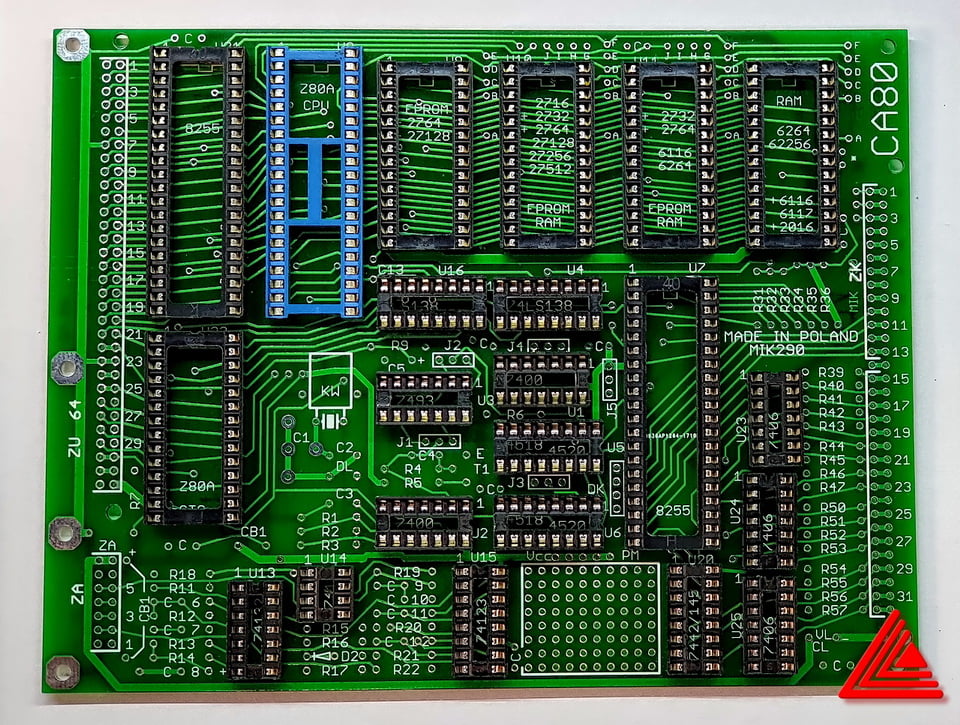
Architektura systemu zawiera prócz mikroprocesora również pamięci RAM i ROM (przewidziano możliwość zastosowania wielu rodzajów pamięci równoległych skupionych w 4 bankach). Są tam także dwa układy portów równoległych 8255 (przeznaczone m.in. do obsługi podstawowych peryferiów, jak klawiatura i wyświetlacz) oraz timer programowalny Z80CTC. Mikrokomputer obsługuje również pamięć masową w postaci magnetofonu kasetowego (obecnie raczej jest to ciekawostka, choć zapis i odczyt można zrealizować w formacie MP3). Historycznie powstały dwie oryginalne wersje mikrokomputera i co za tym idzie i dwie wersje kompatybilnych płytek PCB. Druga z nich to wersja profesjonalna, posiada płytkę o druku dwustronnym oznaczoną jako MIK290 (rys.1.). Wersja ta przystosowana jest do pracy w zamkniętej obudowie pochodzącej od produkowanych wówczas kalkulatorów biurowych Elwro, co wraz z zewnętrznym zasilaczem stanowiło to dosyć zwartą i estetyczną konstrukcję.
rys. 1 Płytka PCB w wersji MK290 (widok od strony elementów)
Jeśli chodzi o tzw. interfejs komunikacji z użytkownikiem, w pierwszej wersji przewidziano klawiaturę o układzie kilkunastu klawiszy, były to cyfry w kodzie szesnastkowym od „0” do „F” oraz kilka podstawowych przycisków funkcyjnych. W drugiej natomiast wersji dołożono kolejne przyciski funkcyjne („F1” do „F4”), tak aby layout zgadzał się z używanym we wspomnianych już kalkulatorach Elwro. Mikrokomputer w wersji defaultowej posiada wyświetlacz lampowy o 8-miu polach 7-mio segmentowych (tzw. ósemki) z segmentem punktu dziesiętnego (DP). Ponieważ coraz bardziej atrakcyjne w tamtym czasie zaczęły być wyświetlacze LEDowe, począwszy od wersji drugiej PCB (MIK290) można było podłączyć do systemu LEDowe zamienniki lamp aż dwóch wersjach: ze wspólną anodą oraz wspólną katodą. Niestety one również mogły mieć jedynie 8 pól, każde po 7 segmentów, tak samo jak ich lampowi protoplaści. Ten ficzer wymagał jeszcze dołożenia jednej z płytek MIK295 lub MIK296, w zależności od wersji posiadanego wyświetlacza: ze wspólną katodą lub wspólną anodą.
rys.2. Fragment płyty mikrokomputera CA80 obsadzonej oryginalnymi układami scalonymi
Przystępujemy do działania.
Na znanym portalu aukcyjnym można bez przeszkód w chwili obecnej nabyć zestaw układów scalonych oraz płytkę PCB w wersji MIK290. Wśród układów znajduje się zaprogramowana już pamięć EPROM z rozszerzoną wersją oprogramowania dla komputerka oraz „wypasiona” pamięć statyczna RAM 32kB i naturalnie wszystkie pozostałe układy scalone. Opisy zawarte w książeczkach MIK ściągamy przy wydatnej pomocy wujka Google np. z Elektrody lub jednej z kilku dedykowanych dla CA80 stron www. Tam też znajduje się jeszcze wiele ciekawych materiałów, mogących być przydatnymi podczas prac montażowo-rozruchowych.
Zeszyty MIK.
W czasie kiedy trwa dostawa zamówionej płytki oraz części mikrokomputera i po wykonaniu dogłębnego researchingu w temacie oraz ściągnięciu rozlicznych materiałów, jest czas na „przestudiowanie” oryginalnej dokumentacji w postaci legendarnych już zeszytów MIK. Tutaj byłoby wszystko oczywiste, gdyby nie fakt, że mając już jakieś podstawy (a nawet „trochę” więcej niż podstawy) w zakresie wiedzy z dziedziny elektroniki cyfrowej i ogólnej wiedzy o funkcjonowaniu systemów mikroprocesorowych, także opartych na procesorach sprzed 30 z hakiem lat, nie ma najmniejszego sensu zagłębiać się w 8 początkowych zeszytów, gdyż po prostu niewiele jest tam ciekawostek i jakiejś nowej wiedzy. Na uwagę jednak zasługuje zeszyt MIK-09, który jest „core of the cores” wiedzy niezbędnej do poskładania komputerowego ustrojstwa na bazie płyty MIK290.
Niestety trzeba przyznać panu autorowi, że większego chaosu w podawaniu informacji technicznych chyba nie ma nigdzie. Wiedza bardzo podstawowa miesza się w Zeszytach z opisami korzystania z oprogramowania (a my nie mamy jeszcze nawet wstępnie poskładanej płytki), do tego wiele odnośników do wcześniejszych Zeszytów oraz garść powtrącanych przypadkowo zupełnie nieistotnych, z punktu widzenia montażu systemu, informacji. Jeśli przebrniemy już przez te wszystkie meandry i dotrwamy do właściwego opisu montażu PCB, dodatkowym utrudnieniem jest zawarcie wszelkich rysunków i tabel a przede wszystkim schematów ideowych na końcu zeszytu przy czym opis, do których się one odnoszą jest porozrzucany dosyć dowolnie po całym tomie. Utrudnienie to jest tym większe, jeśli korzysta się z wersji Zeszytu w formacie PDF a nie tradycyjnego wydruku papierowego.
Ważna rada: Wydrukować przeto należy co ważniejsze schematy i jeszcze ważniejsze tabele i pasujące do nich opisy, to znacznie ułatwia pracę i minimalizuje powstanie kardynalnych błędów, których i ja się nie ustrzegłem.
Rusza „od strzału” ?
W MIK-09, jak i w rozlicznych materiałach reklamowych z epoki, czytamy dosyć wyeksponowane stwierdzenie: „W większości przypadków, po zmontowaniu układów na płytce, urządzenie zgłasza się poprawnie komunikatem 'CA80′ „. Jest to znamienne twierdzenie i cokolwiek wątpliwa jest jego prawdziwość, szczególnie w zestawieniu z pomocami naukowymi jakie serwuje nam dokumentacja. Tak czy siak należy się wielki szacunek tym, zapewne niezbyt licznym zapaleńcom, którym udało się od „pierwszej kopy” odpalić to ustrojstwo. Trzeba również mimo wszystko oddać hołd autorowi inżynierowi Gardynikowi, gdyż w tamtych zamierzchłych czasach był on pionierem w dziedzinie kitów do samodzielnego montażu i generalnie, w dziedzinie edukacji cyfrowej młodych polskich chłonnych wiedzy głów. Do tego, pewnie cykl wydawniczy zeszytów MIK wymuszał podówczas ich zawartość a trzeba wiedzieć, że powstawały one na przestrzeni kilku lat i „rozwijały” się niejako razem z doświadczeniami ich autora i wraz z tworzeniem kolejnych wersji hardware’u i softu.
Przed przystąpieniem do montażu skompletowanych starannie elementów należy zdecydować, która wersja i jakie ficzery będzie miał nasz systemik. Ja tego niestety nie zrobiłem, wypuszczając się na szeroko pojęty żywioł (wszak zielony przecież całkiem nie jestem a zaprawionym w bojach i owszem), co jednak skończyło się, tak jak się skończyło, czyli śpiesznym wylutowywaniem niepotrzebnie zamontowanych elementów oraz podmianą układów na inne (na szczęście były w podstawkach).
Montaż
Składany przeze mnie system miał zaistnieć pierwotnie w wersji podstawowej, tzn. posiadać miał zakupioną pamięć EPROM i RAM, klawiaturę, wyświetlacz LED oraz zasilanie zewnętrzne (tylko +5V). Ochoczo zabrałem się więc do lutowania podstawek, a później całej masy drobnych elementów biernych i czynnych na płycie. Zdziwieniem moim był prawie brak kondensatorów elektrolitycznych odsprzęgających zasilanie i dosyć duża dowolność w rozmieszczaniu kondensatorów blokujących 100nF. Zaskakująca, jak na dzisiejsze czasy, jest również ilość elementów biernych w ogóle, ale w sumie da się przeżyć, zwłaszcza mając dostęp do obszernego magazynu tychże. Płytka w fazie początkowej montażu jest pokazana poniżej (rys.3).
rys.3. PCB w trakcie montażu.
Wyświetlacz LED
Jak już wspomniałem wyżej, mój system CA80 posiada wyświetlacz LED (ze wspólną katodą). Zeszyt MIK09 zaleca w przypadku takiego wyświetlacza zaopatrzenie się w osobną płytkę MIK295, która obecnie nie jest w zasadzie do zdobycia. Nic to, wyświetlacz został zmontowany na płytce uniwersalnej i skrosowany do listwy ZW płyty głównej (MIK290). Plusem w tym przypadku była możliwość użycia czteropolowych wyświetlaczy LED, co zaoszczędziło trochę żmudnego krosowania. W moim wykonaniu użyłem dwóch wyświetlaczy o wspólnej katodzie, typu TDCG1060M produkcji znanej firmy VISHAY.
Należy zauważyć, że współczesne wyświetlacze LED podczas normalnej pracy pobierają raczej mniejszy prąd niż ten, który konsumowałyby oryginały sprzed 30 lat. Dlatego przy doborze wartości rezystorów Rc i Rb należy zastosować raczej górne z sugerowanych wartości. U mnie były to Rc=120 Ohm, Rb=4,7kOhm.
Ważne: Modyfikacje płytki MIK290 związane z implementacją wyświetlania LED należy wykonać tak, jak to sugeruje MIK09 z tym, że w podstawki układów U23, U24, a także i U25, należy włożyć układy buforów prostych (bez negacji) typu SN74LS07 (lub 74LS17 albo 7407 lub 7417). Taki myk odciąży prądowo i zabezpieczy przed ewentualną pomyłką i zwarciem port równoległy 8255. W podstawkę U20 wkładamy 74145, w miejsce R39 można zastosować dowolną diodę prostowniczą najlepiej na 2A. Na MIK290 nie lutujemy też rezystorów R40 do R47 oraz R50 do R57, o czym to przeczytałem dopiero kiedy płytka MIK290 była już przeze mnie w nie wyposażona.
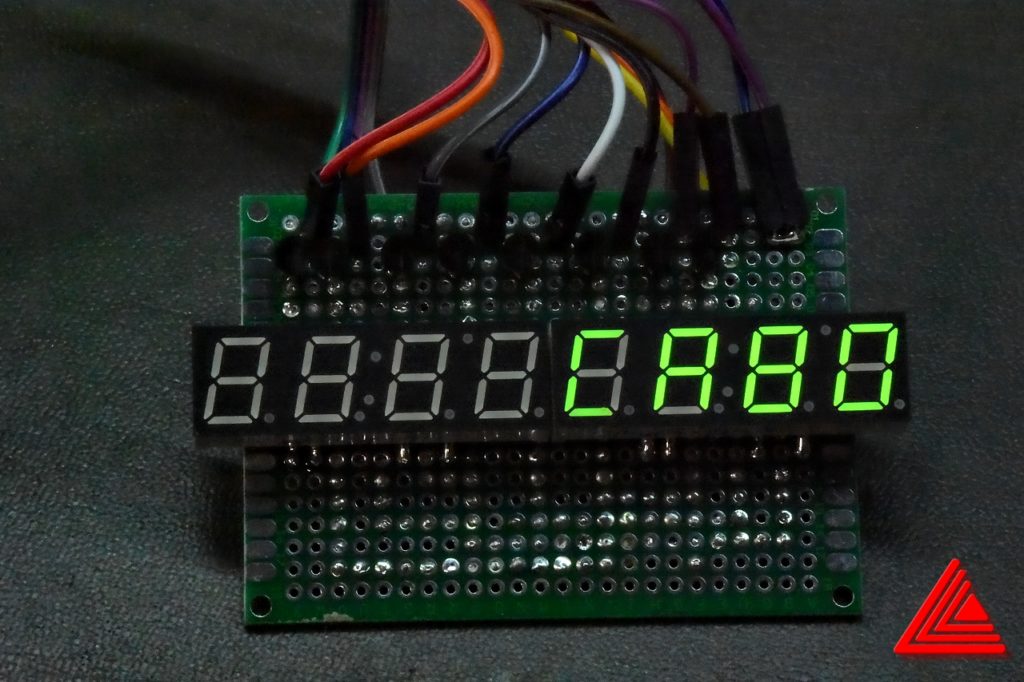
Po zmontowaniu należy wyświetlacz sprawdzić pobudzając jego segmenty poprzez podanie odpowiednich kombinacji logicznych na wyjścia portu U7 (Uwaga: na ten czas układ U7 8255 należy usunąć z podstawki). Jeśli w poprawnie działającym systemie na wyświetlaczu zamiast napisu powitalnego „CA80” widzimy na większości jego pól pełne „ósemki”, warto sprawdzić czy podstawki U20, U23, U24 oraz U25 obsadzone są prawidłowymi dla danego typu wyświetlacza układami. Zmontowany i działający poprawnie wyświetlacz pokazano na rys.5.
rys.5. Zmontowany i uruchomiony moduł wyświetlacza.
Pamięci
Z pamięciami jest niestety ogrom zamieszania. Jest tak z powodu możliwości zastosowania mnogości ich rodzajów o zróżnicowanej wielkości. W zależności od wielkości zastosowanej pamięci należy odpowiednio skrosować punkty oznaczone jako A,B,C,D,E,F oraz czasami G,H,I, ważna jest również zworka J4. Prawidłowe krosy oraz ustawienie J4 opisuje wyczerpująco, acz niezwykle pokrętnie MIK09 w tabeli na str.53 i na schemacie str.56. Przed przystąpieniem do uruchamiania systemu należy rozpisać sobie jakie pamięci i w które podstawki zostaną zainstalowane i jakich wymaga to modyfikacji na płycie. Ułatwia to wydatnie ogarnięcie pamięciowego chaosu i ustrzeżenia się przed kardynalnymi błędami.
Uwaga: Jeśli z dokumentacji w MIK09 wynika, że należy wykonać jakiś kros, na przykład A-D i B-E (jak to ma miejsce podczas obsadzenia podstawki U12 pamięcią 32kB RAM) należy zawsze pamiętać, czy nie koliduje to z krosem defaultowym wykonanym już na PCB. W podanym przypadku należy przeciąć ścieżki tworzące połączenie defaultowe, w tym przypadku pomiędzy punktami A-F oraz B-C. W przeciwnym wypadku dojdzie do zwarcia na szynie adresowej, a to w niesprzyjających okolicznościach może zakończyć się nawet uszkodzeniem cennego procesora.
Z dokumentacji MIK09 nie wynika też wprost, że gdy np. obsadzamy podstawkę U9 pamięcią EPROM 27256 należy jej nogę 27 odizolować od napięcia zasilania +5V i podłączyć do masy. Nie przewidziano najprawdopodobniej zastosowania pamięci o takiej wielkości, jako pamięć ROM.
Ważne: Kluczem do sukcesu jest aby w podstawce U9 znajdowała się zawsze pamięć ROM z procedurą startową systemu, ponieważ procesor zaczyna wykonywanie programu zawsze od adresu 0x0000, zaś w podstawce oznaczonej jako U12 musi znajdować się pamięć RAM.
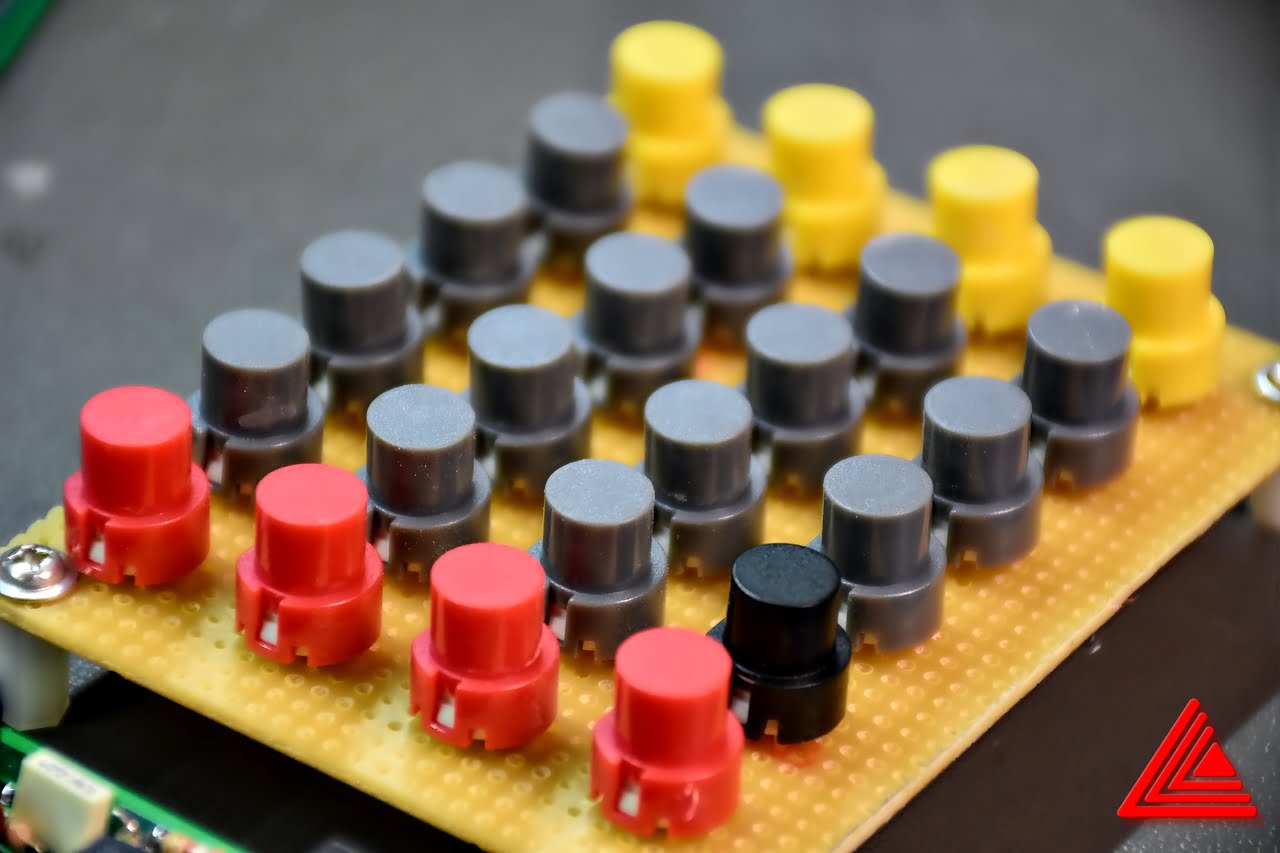
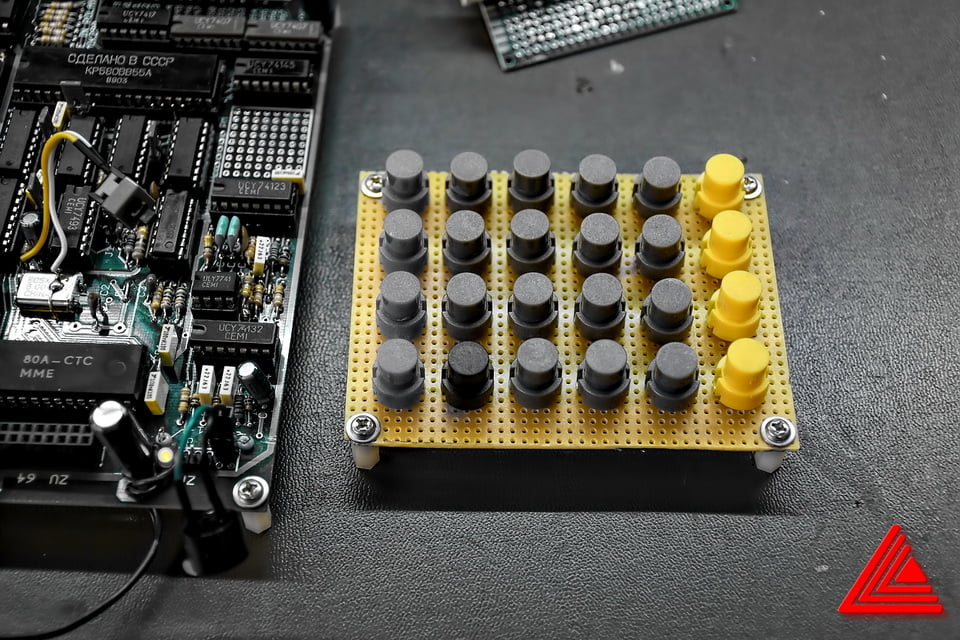
Klawiatura
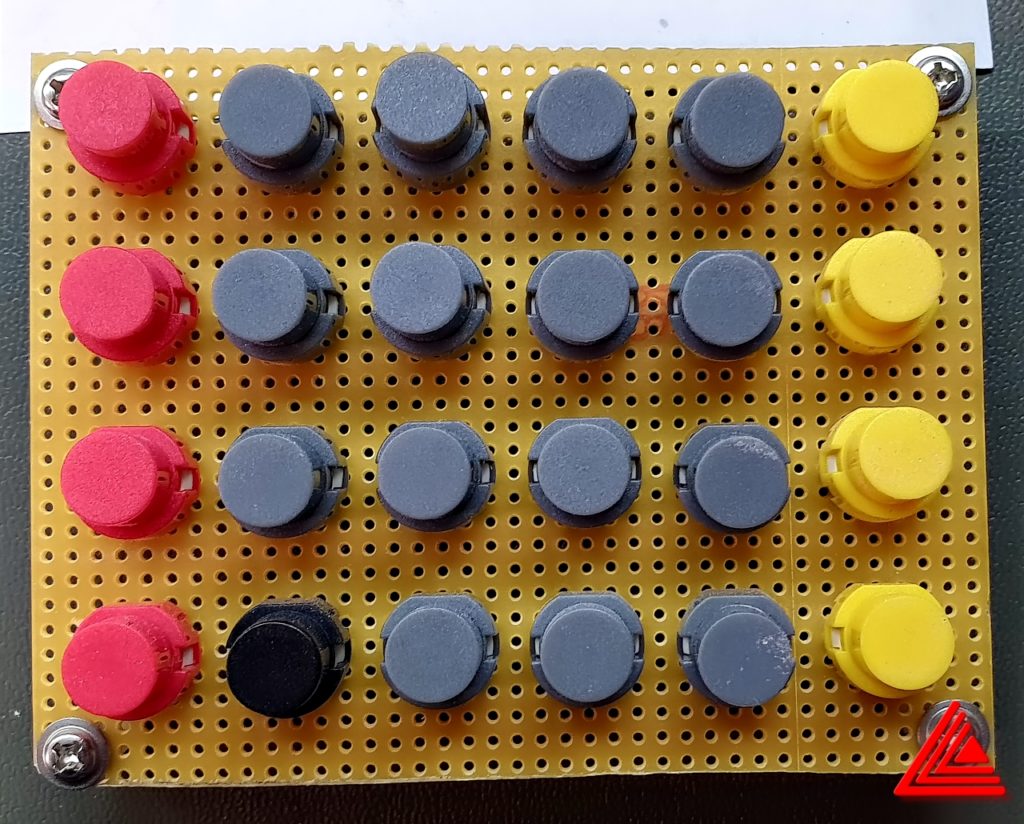
Oryginalna klawiatura od kalkulatora Elwro jest obecnie coraz mniej dostępna. Postanowiłem więc wykonać własną klawiaturę z popularnych przycisków monostabilnych lutowanych wprost do uniwersalnej płytki drukowanej, która następnie została skrosowana na wzór oryginalnej klawiatury według schematu ze str.57 zeszytu MIK09. Układ klawiatury pokazany jest dla utrudnienia na str.19 tegoż zeszytu. Rysunek 6 (poniżej) przedstawia layout klawiatury w fazie tworzenia.
rys.6. Klawiatura w fazie montażu.
W praktyce tak wykonana klawiatura będzie, jak mniemam, raczej niewygodna w użytkowaniu dlatego na dłuższą metę zostanie zastąpiona interfejsem klawiatury komputerowej PS/2. Interfejs taki zostanie przeze mnie wykonany jako pierwsze rozszerzenie hardwre’u mikrokomputera. Przynajmniej takie są plany :).
Zasilanie
Jako, że budowa dedykowanego zasilacza z tzw. „prawdziwego zdarzenia” nie zawsze ma sens, mój system CA80 korzysta z zasilacza zewnętrznego +5V 2A. Mogłem tak zrobić, ponieważ nie potrzebuję napięcia +30V dla wyświetlacza lampowego a napięcie -5V potrzebne w interfejsie magnetofonowym, przewiduję wytworzyć za pomocą miniaturowej przetwornicy izolowanej 5VDC/5VDC 1W np. firmy Aimtec, która to przetwornica spokojnie mieści się na dodatkowym polu montażowym płytki MIK290.
Warto wspomnieć, że nie wykorzystując zasilacza dedykowanego dla CA80, warto wejście zasilania na złączu ZA zabezpieczyć diodą mocy (zabezpieczenie przed odwróceniem zasilania) oraz diodą zenera lub transilem (zabezpieczenie przed podaniem zbyt wysokiego napięcia zasilania). Zamiast transila można też pokusić się o zbudowanie prostego układu z tyrystorem i diodą zenera na jego bramce, którego zadaniem będzie zwarcie do masy zasilania +5V w przypadku przekroczenia granicznej wartości 5,2V.
Uwagi końcowe
Moim zdaniem warto jeszcze wyprowadzić z płytki MIK290 wygodny sygnał RESET, tj. kabelek zakończony przyciskiem monostabilnym. Warto podłączyć go pomiędzy rezystor R9 a masę (zadziwiające, że autor tak mało uwagi poświęca temu sygnałowi, ba nie jest on nawet doprowadzany np. do układów 8255).
Następną kwestią bardzo przydatną w toku uruchamiania systemu jest montaż kołków zasilania +5V i masy, dla łatwego podłączenia miernika, sondy logicznej, czy oscyloskopu lub analizatora stanów logicznych, jeśli ktoś posiada. Najlepiej wykonać to udogodnienie w pobliżu złącza ZA. Ja dodatkowo podlutowałem również czerwoną diodę świecącą, która ma sygnalizować wizualnie obecność napięcia zasilania +5V.
Do kondensatorów blokujących znajdujących się na płycie MIK290 (zwłaszcza tych w pobliżu złącz ZA i ZW) dobrze jest równolegle dołożyć kondensatory elektrolityczne o pojemności przynajmniej kilkudziesięciu mikrofaradów i napięciu pracy minimum 6V. Obserwacje oscyloskopem szyny zasilania pokazują bowiem dosyć wysoki poziom zakłóceń wnoszonych przez poszczególne komponenty systemu.
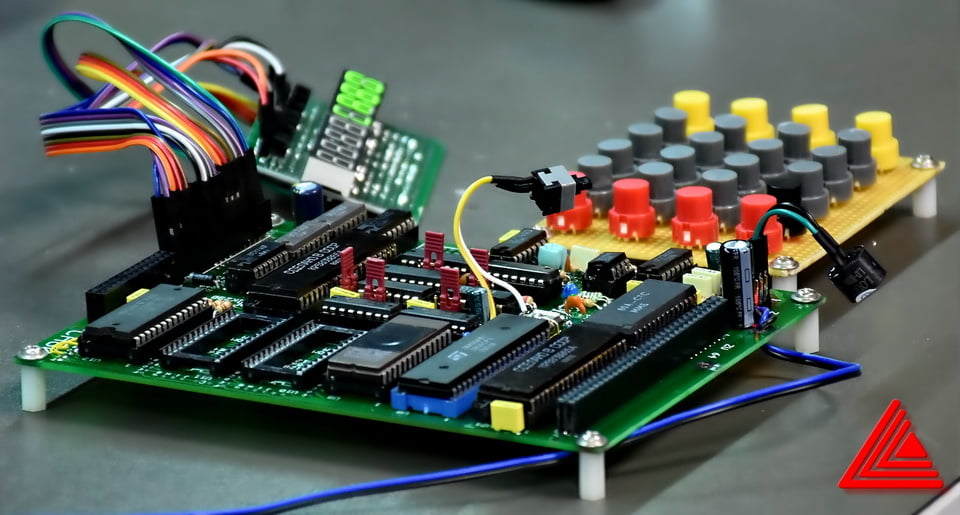
W mojej konstrukcji zastosowałem kwarc 16MHz, co w konsekwencji dało zegar procesora CLK=4MHz a przerwanie NMI wzbudzane jest z częstotliwością 500Hz. Jest to defaultowe rozwiązanie opisane na samej górze str.54 zeszytu MIK09. Rozwiązanie to wymaga zastosowania w miejsce U5 i U6 układów typu 4518 (w moim przypadku układy te nie wchodziły w skład zakupionego zestawu części dla CA80 i zostały zakupione osobno). Musze przyznać, że jak dotąd nie wykonałem strojenia układu zegarowego, zostawiam to w sumie na potem.
rys.7. CA80 w trakcie uruchamiania.
Wszystkim śmiałkom, którzy zdecydują się na budowę tego „zabytkowego” mikrokomputerka życzę sukcesu i wiele satysfakcji.
Gdyby ktoś chciał się podzielić ze mną swoimi uwagami, zadać pytanie dotyczące uruchamiania tego systemu lub po prostu pochwalić się swoimi sukcesami na tym polu, bardzo proszę o kontakt: elserw@elserw.com lub FB: Elektronika Serwis
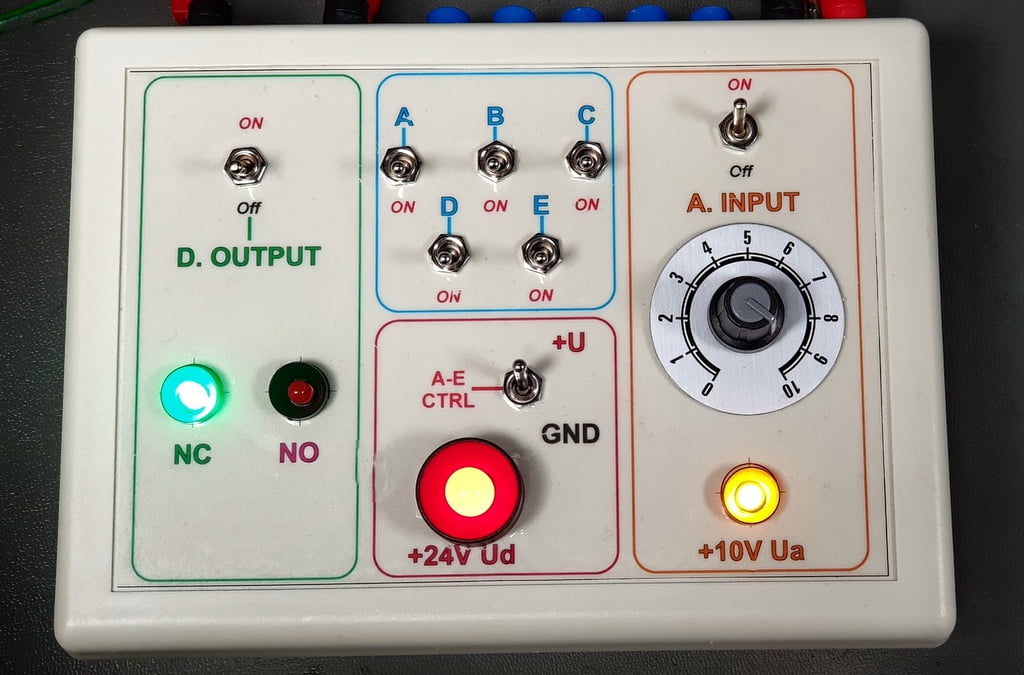
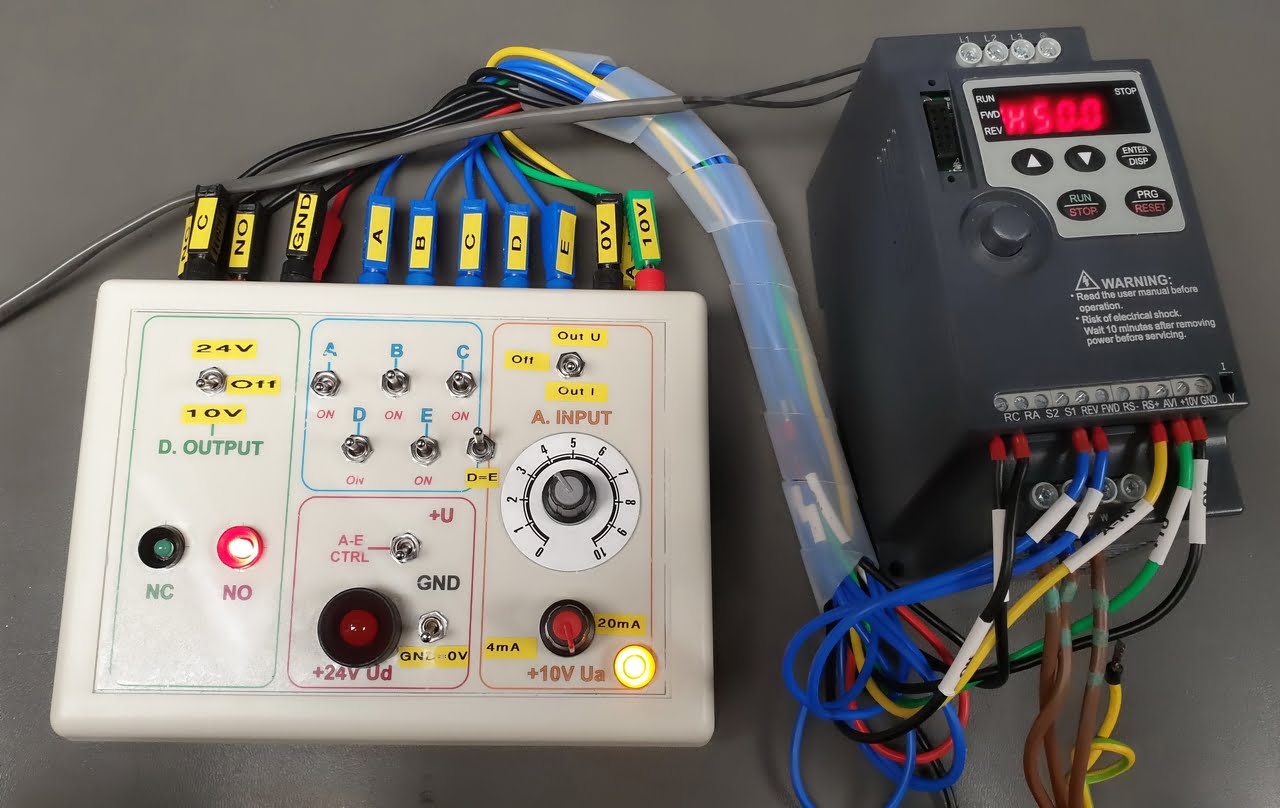
Jak to często bywa „potrzeba matką wynalazku”, powstał więc najpierw schemat a niedługo później gotowe urządzenie, którego główną funkcją jest zadawanie standardowych sygnałów sterowniczych cyfrowych (zarówno podczas sterowania „masą” jak i „plusem”) oraz analogowego, a także badanie w czasie rzeczywistym obecności napięć zasilania wytwarzanych przez podłączony inwerter i stanów pojawiających się na wyjściach cyfrowych tegoż.
O ile schemat połączeń i same połączenia są stosunkowo proste, o tyle już samo wykonanie nie, a to z uwagi na konieczność zamocowania wielu elementów mechanicznych, jak kontrolki, przełączniki, gniazda, itp. i nadanie temu jakiejś estetycznej i uporządkowanej formy.
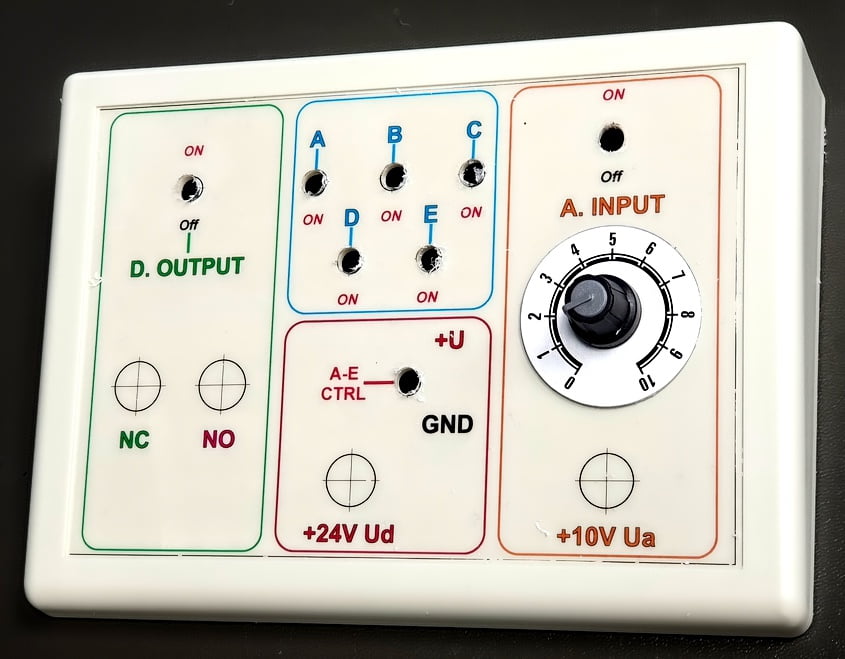
Podstawowe Parametry Techniczne
kontrola napięć: 24V i 10V
5 wyjść cyfrowych (sterowanie „plusem” – 24V lub sterowanie „minusem” – GND) z możliwością mostkowania wyjść „D” i „E” w wersji rozbudowanej zadajnika
1 wyjście analogowe napięciowe (0-10V), które może pracować jako wyjście prądowe (4-20mA) w wersji rozbudowanej zadajnika
2 wejścia cyfrowe (maks. 24V), w wersji rozbudowanej pracujące również z napięciem 10V
Rozdzielone masy (analogowa i cyfrowa) z możliwością ich połączenia w wersji rozbudowanej zadajnika
połączenie zadajnika z inwerterem za pomocą oznakowanych, kolorowych przewodów uniwersalnych z wtykami bananowymi
Po wielkich bólach i wielu próbach (co widać na fotkach poniżej) urządzenie weszło na stan jako pełnoprawne i nota bene bardzo przydatne narzędzie serwisowe.
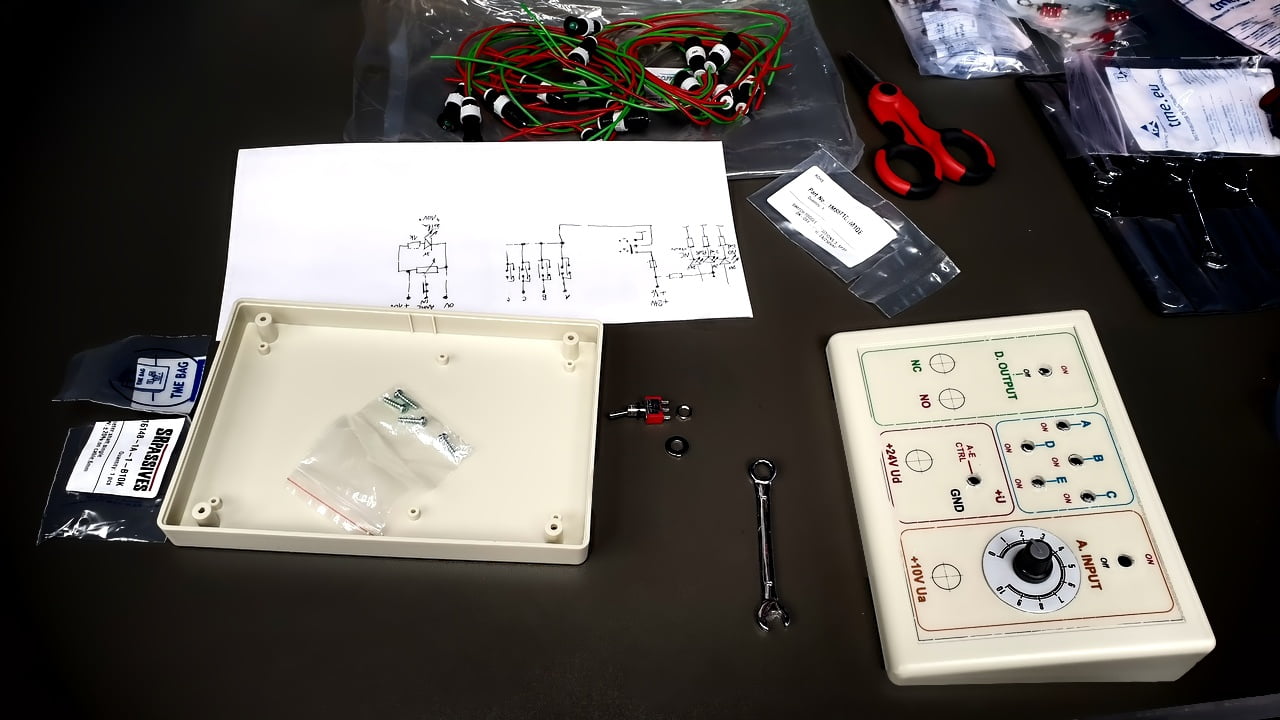
REPORTAŻ z WARSZTATU
Zestaw części i narzędzi – Zaczynamy.
Naklejamy szablon i wiercimy otwory.
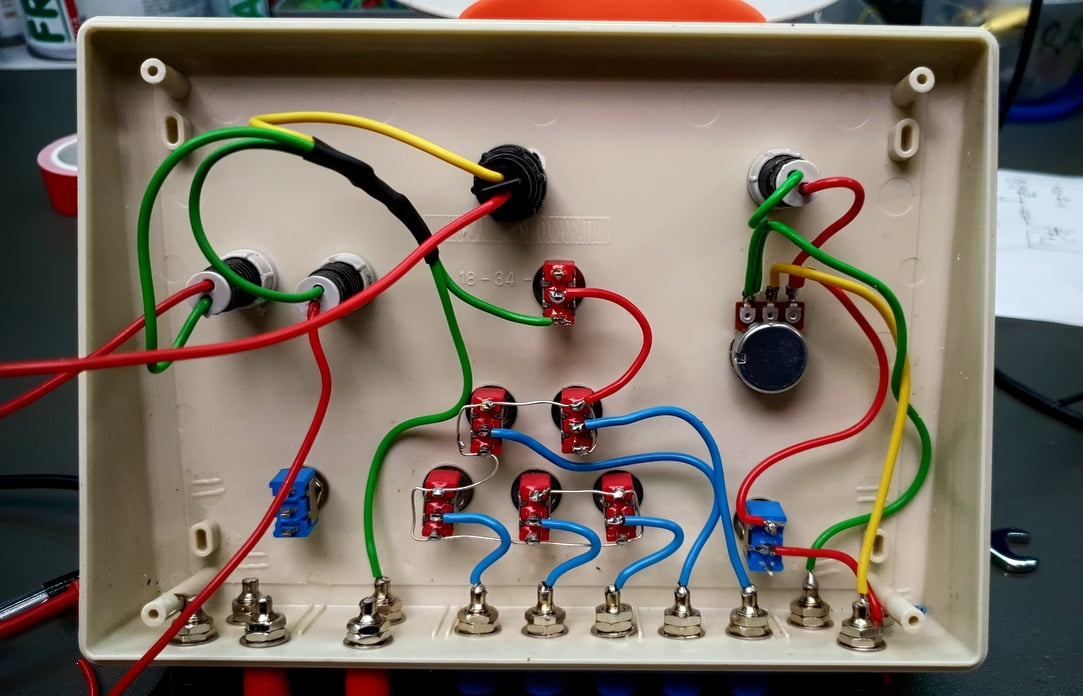
Porządnie mocujemy w obudowie wszystkie części
Łączymy według schematu wszystkie elementy zadajnika.
Zadajnik jest gotowy – Sprawdzamy działanie wszystkich układów.
Dodajemy odpowiednio przygotowane i opisane kable połączeniowe.
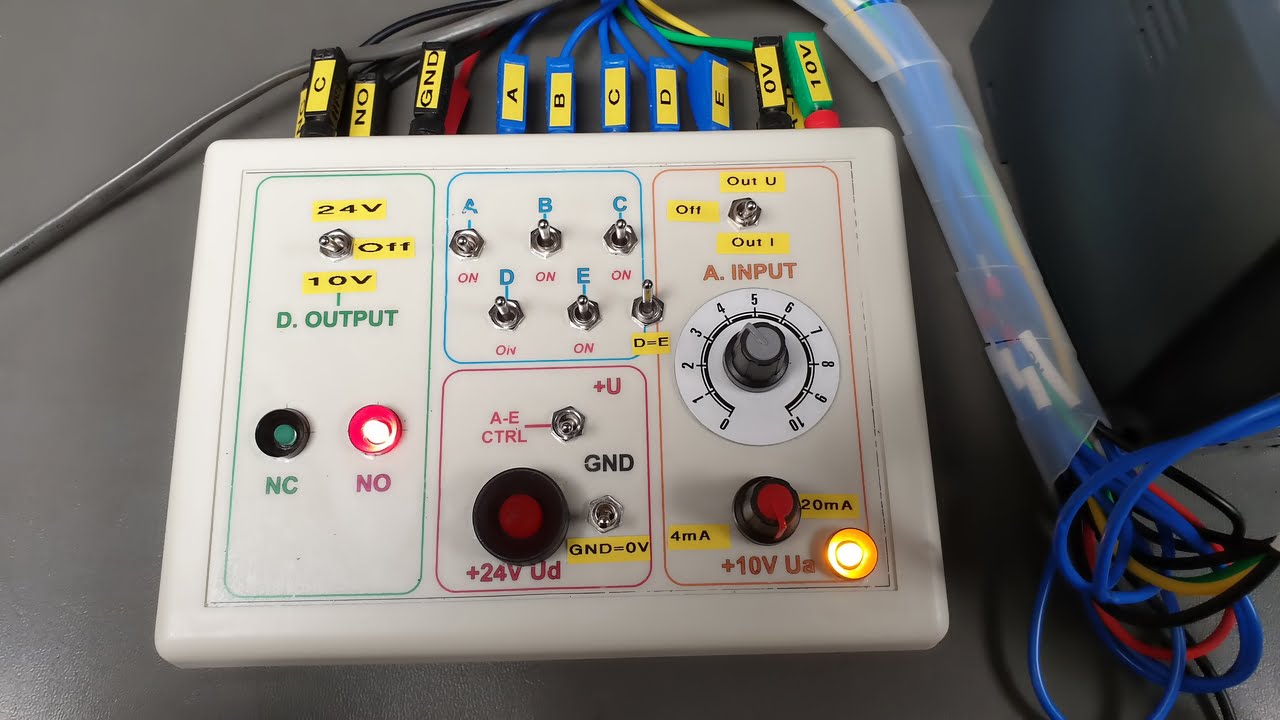
Zadajnik Inwerterów – wersja rozbudowana „full wypas”
Podczas korzystania z zadajnika okazało się, że warto by dodać jeszcze parę fajnych funkcjonalności między innymi z tego powodu, że niektóre tanie falowniki produkcji „Myfriend” mają pewne, nazwijmy to „upośledzenia” sterowania. Na przykład falowniki firmy Sanyu nie posiadają możliwości sterowania „plusem”, więc na ich listwie zaciskowej w ogóle nie wyprowadzono napięcia +24V, a masa sterowania jest wspólna z masą zadawania napięciowego, co ograniczałoby funkcjonowanie naszego zadajnika.
Tak więc w nowej wersji zadajnik uległ następującym modyfikacjom i modernizacjom:
zasilanie wyjść przekaźnikowych falownika zyskało przełącznik umożliwiający pracę tej części zadajnika z napięcia +10V,
dodatkowy wyłącznik pozwala połączyć masy, analogową i cyfrową we wspólną masę występującą na obydwóch podłączeniach „GND” i „0V”,
zadawanie wejść cyfrowych zyskało możliwość mostkowania dodanym wyłącznikiem kanałów „D” i „E”,
ciekawostką jest dodanie modułu zadawania prądowego z osobnym potencjometrem do jego ustawiania i przełącznikiem, który umożliwia pracę wyjścia „IN-A” jako wyjście prądowe, napięciowe lub odłączenie („off”).
Jedynym problemem stała się warstwa opisowa, która musiała zostać „wzbogacona” o naklejki opisujące dodatkowe funkcje urządzenia.
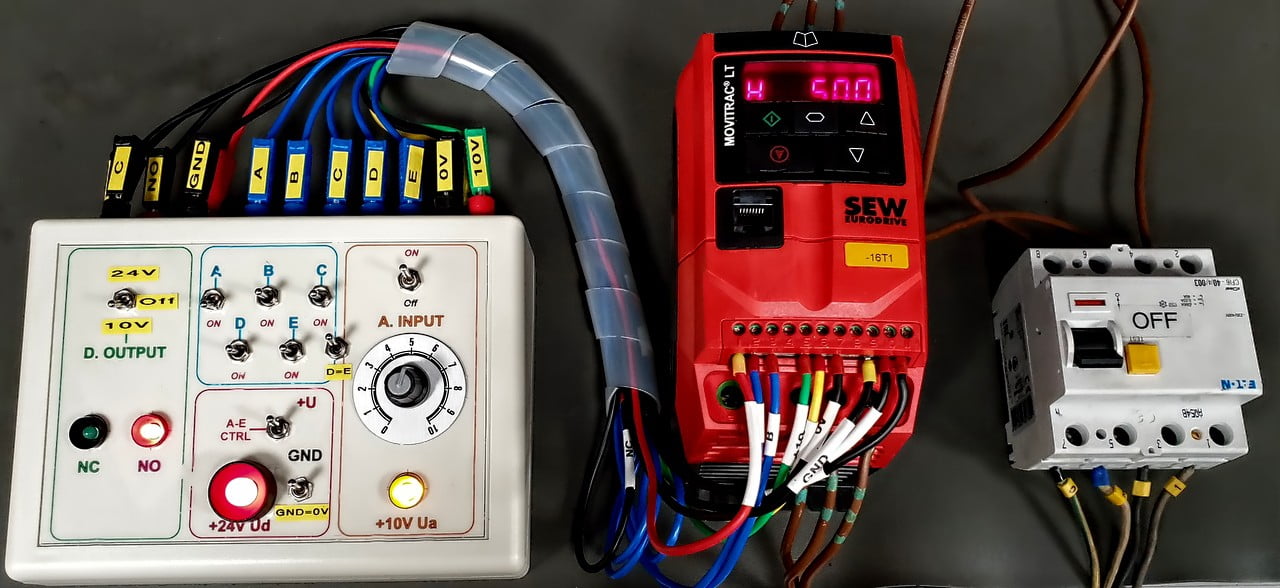
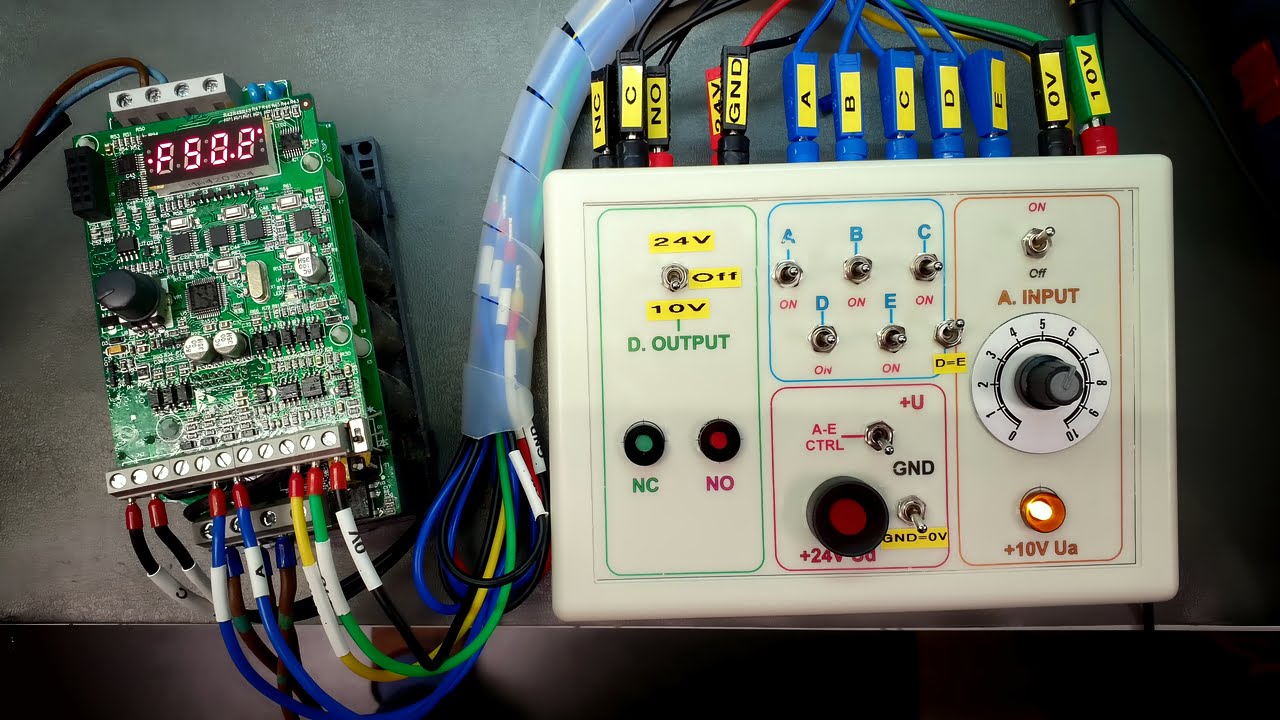
URZĄDZENIE w AKCJI
Zadajnik podłączony do falownika SEW, gotowego do pracy.
Falownik w trakcie naprawy.
Zadajnik w wersji rozbudowanej współpracuje także z urządzeniami firmy Sanyu i innymi inwerterami niskobudżetowymi.
Projekt – Mikroprocesorowy sterownik grzałek typu SHHC
Przedstawiamy mikroprocesorowy sterownik grzałek zaprojektowany i wykonany w celu zapobiegania awariom grzałek używanych m.in. w przemysłowym procesie termoformowania tworzyw sztucznych. Przekaźnik ten służy do sterowania zasilaniem grzałek tzw. „gorących stołów” wykorzystywanych w procesach przemysłowych. Urządzenie może również być stosowane jako „inteligentne” sterowanie zasilaniem dowolnego odbiornika mocy o charakterze rezystancyjnym i napięciu pracy 230-400V AC.
Głównym celem stosowania tego typu sterowników jest ochrona grzałek przed uszkodzeniem na skutek przepalenia lub zwarcia. Jest to zrealizowane między innymi poprzez ograniczenie mocy dostarczanej do obwodu grzałki w początkowej fazie sterowania (jeden z wariantów softstartu). Kolejnym powodem zastosowania naszych sterowników mikroprocesorowych jest sygnalizacja stanów awaryjnych i dzięki temu szybka diagnoza uszkodzonych obwodów, co zmniejsza straty produkcji i zapobiega rozprzestrzenianiu się skutków awarii.
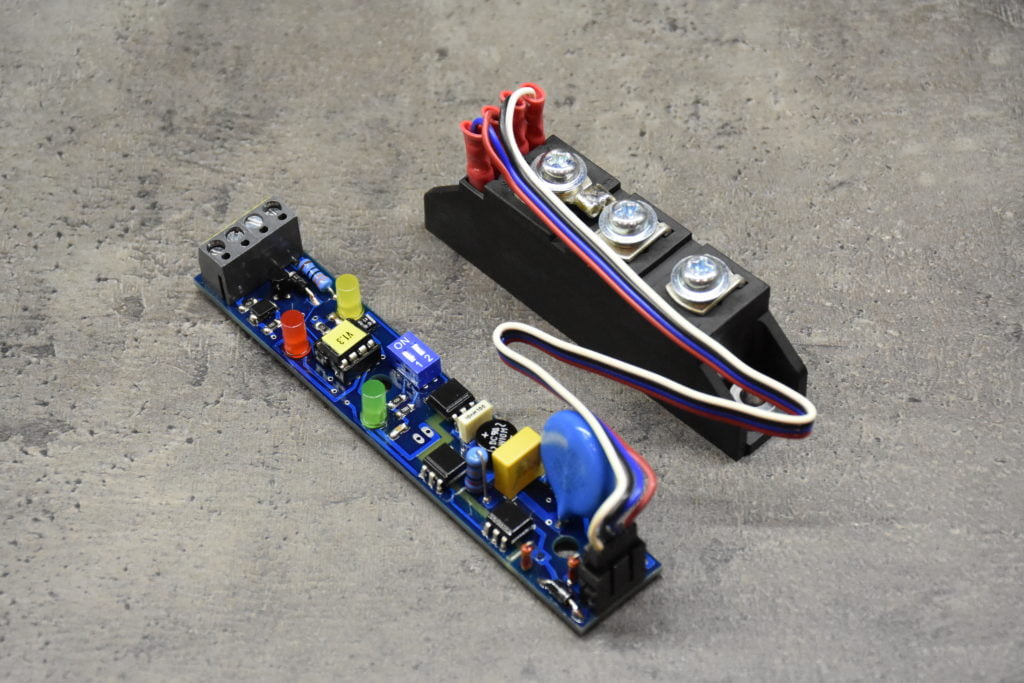
Każdy z naszych sterowników współpracuje z tyrystorowym elementem mocy, który jest dostarczany w zestawie. Zestaw taki tworzy rodzaj „inteligentnego” mikroprocesorowego przekaźnika SSR dużej mocy.
Parametry Elektryczne
nominalny prąd roboczy: 60A (400V AC),
napięcie zasilania dla sterowania: 24V DC,
napięcie sterowania: 24V DC (standardowo),
wyjście sygnalizacji awarii: 24V DC 200mA.
Podstawowe funkcje urządzenia
mikroprocesorowe bezstykowe tyrystorowe sterowanie odbiornikami mocy z softstartem. W zależności od wersji oprogramowania softstart pracuje w trybie ciągłym (dla każdego cyklu zasterowania) lub w trybie automatycznym,
możliwe jest sterowanie impulsowe lub fazowe (zależnie od oprogramowania lub ustawionego trybu pracy),
sygnalizacja zaniku zasilania odbiornika (przepalenie się bezpiecznika lub brak „fazy” zasilającej grzałkę),
sygnalizacja przerwy w obwodzie odbiornika (przepalenie się grzałki),
sygnalizacja optyczna zasterowania przekaźnika oraz stanu awarii,
wyjście OUT, na którym pojawia się napięcie +24V w przypadku wykrycia zaniku zasilania lub przerwy w obwodzie odbiornika,
przełączalne tryby pracy oraz tryb serwisowy (periodyczna komutacja niezależnie od warunków sterowania i kondycji zasilania mocy).
Uwaga:
Na życzenie Klienta zaprojektujemy i wykonamy sterownik o innych parametrach i funkcjach użytkowych.
Skrócony opis działania
Sterownik posiada między innymi wbudowaną funkcję kontroli obwodu zasilania odbiornika. Żółta dioda świecąca LED sygnalizuje zanik fazy zasilającej odbiornik lub przerwę w jego obwodzie, równocześnie z jej oświeceniem na wyjściu sygnalizacji awarii (OUT) pojawia się napięcie stałe 24V DC, które podłączone na przykład do wejścia cyfrowego sterownika PLC lub regulatora temperatury, może służyć do zatrzymania procesu produkcyjnego albo sygnalizacji powstałej awarii. Zastosowanie po jednym sterowniku na każdy z kanałów grzania pozwala dzięki sygnalizacji w szybki sposób zlokalizować wadliwie działający obwód.
Czerwona dioda świecąca LED sygnalizuje stan komutacji sterownika – jej świecenie oznacza przepływu prądu w obwodzie zasilania odbiornika.
Do tej pory wykonaliśmy dla naszych Klientów kilkadziesiąt sztuk przedstawionych tutaj sterowników. Z powodzeniem pracują one w eksploatowanych od kilku lat urządzeniach przemysłowych.
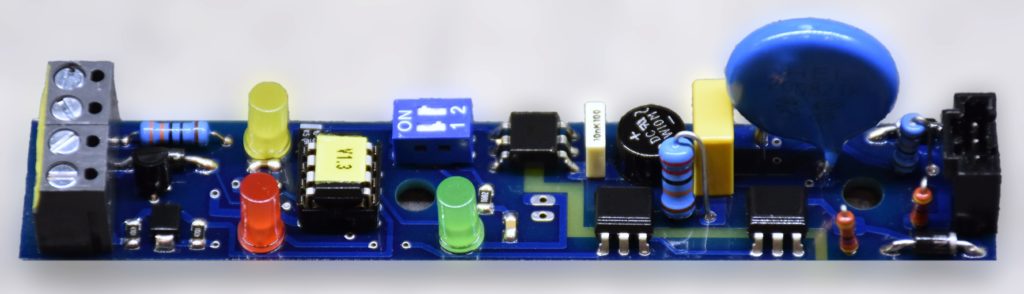
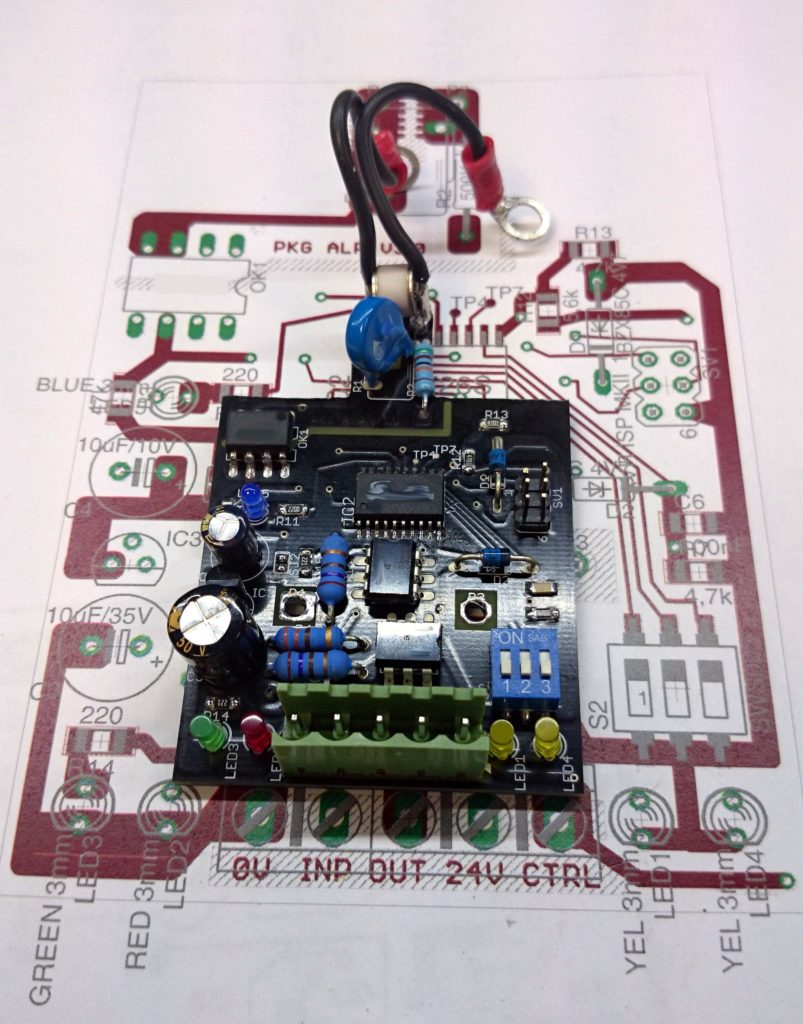
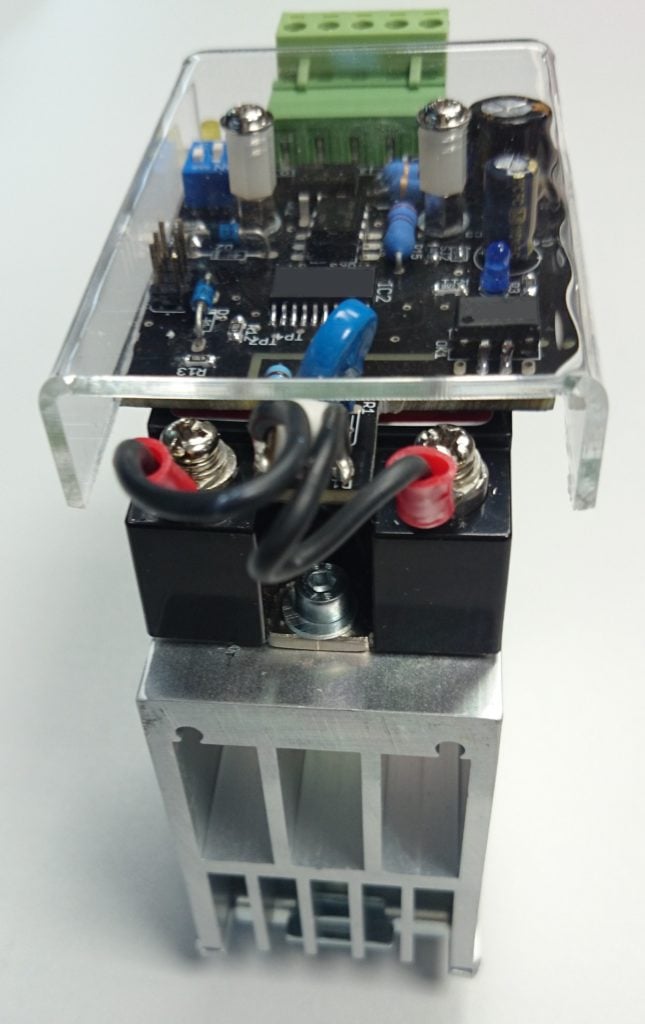
Konstrukcja
Urządzenie jest zbudowane zastosowaniem tyrystorowego modułu mocy (60A/400V AC) oraz w oparciu o układ wykonany w technologii mieszanej THT/SMD, którego zadaniem jest sterowanie mocą oraz sygnalizacja stanów awaryjnych przekaźnika.
W celu zabezpieczenia przed możliwymi przepięciami, które mogą wystąpić w obwodzie załączanym np. na skutek zwarcia odbiornika, sterownik wyposażony jest w warystorowe zabezpieczenie przeciwprzepięciowe. Dodatkowo płytkę układu wykonaną z włókien o dużym współczynniku dielektrycznym, zabezpieczono obustronnie warstwą lakieru izolacyjnego oraz zastosowano specjalne strefy izolacyjne. Układy sterowania i ich zasilanie jest odizolowane optycznie od obwodów mocy i potencjału modułu tyrystorowego.
Firma ELEKTRONIKA SERWIS projektuje i wykonuje urządzenia elektroniczne według indywidualnych potrzeb Klientów.
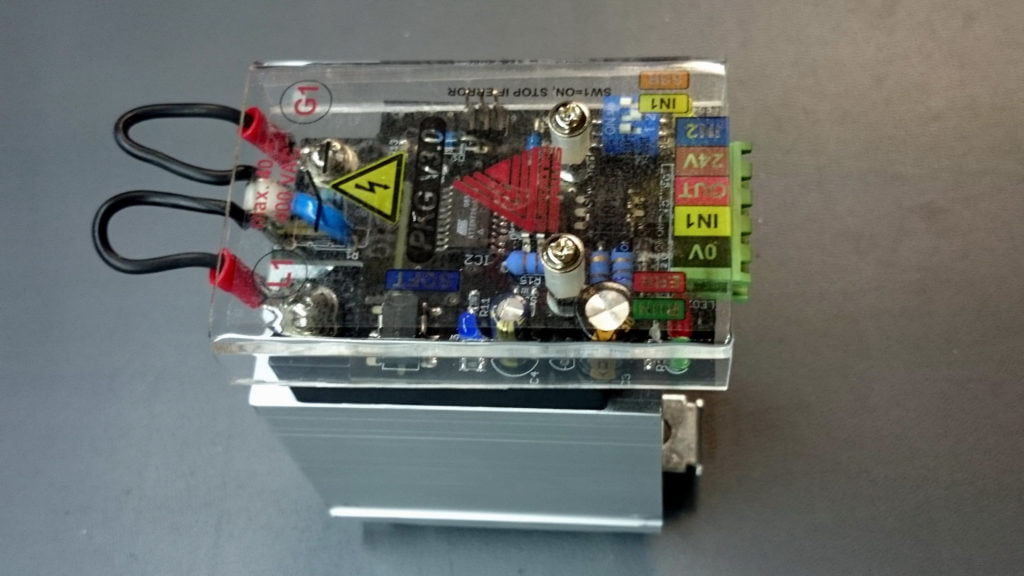
Przedstawiamy wykonany dla celów przemysłowych Przekaźnik Elektroniczny (PKG) w wersji V3.0. Przekaźnik ten służy do sterowania zasilaniem grzałek w formach wtryskowych lub na przykład w tzw. „gorących stołach” wykorzystywanych w procesie termoformowania tworzyw sztucznych. Urządzenie może również być wykorzystywane jako sterowanie zasilaniem dowolnego odbiornika mocy o charakterze rezystancyjnym i napięciu pracy 12-600V ACoraz prądach do 100A.
Parametry Elektryczne
Parametry Przekaźników Elektronicznych typu PKG zależą od zastosowanego w danej serii elementu mocy typu SSR. Standardowy produkt posiada następujące parametry elektryczne:
maksymalny prąd roboczy: 40A (400V AC),
napięcie zasilania: 24V DC,
napięcie sterowania: 24V DC,
wyjście sygnalizacji awarii: 24V DC 200mA
Podstawowe funkcje urządzenia
bezstykowe, tyrystorowe sterowanie odbiornikami mocy (zastosowane „przełączanie w zerze” minimalizuje zakłócenia elektryczne). Zastępuje z powodzeniem styczniki elektromechaniczne oraz standardowe przekaźniki SSR.
opcja SOFTSTARTU przedłuża żywotność elementów grzejnych. Łagodne, realizowane fazowo, wygrzewanie zimnych elementów grzejnych minimalizuje możliwość ich przepalenia oraz wydatnie wydłuża czas ich bezawaryjnej pracy.
sygnalizacja zaniku zasilania odbiornika (np. przepalenie się bezpiecznika lub brak „fazy” zasilającej grzałkę). Umożliwia szybką lokalizację awarii, a w połączeniu z funkcją wyjścia OUTstanowi zabezpieczenie przed niewłaściwą pracą maszyny.
sygnalizacja przerwy (lub zwarcia) w obwodzie odbiornika (przepalenie się grzałki, zwarcie grzałki lub jej przewodów zasilania). Umożliwia szybką diagnostykę niesprawności kanału grzania, a w połączeniu z funkcją wyjścia OUTstanowi zabezpieczenie przed rozprzestrzenianiem się skutków awarii (np. ogranicza możliwość powstania pożaru poprzez automatyczne odłączenie zasilania systemu grzania w maszynie).
sygnalizacja optyczna „zasterowania” przekaźnika, oraz sygnalizacja stanów awaryjnych i pracy w poszczególnych trybach.
wyjście OUT, na którym pojawia się napięcie 24V w przypadku wykrycia niewłaściwych warunków pracy obwodu grzania (np. zaniku zasilania, przerwy lub zwarcia w obwodzie odbiornika). Wyjście to może dołączone do wejścia sterownika, którego pobudzenie sygnalizuje problem z grzaniem na panelu operatorskim, odłączyć zasilanie obwodów mocy i/lub przerwać pracę maszyny, zapobiegając wytwarzaniu wadliwych detali i chroniąc maszynę przed skutkami ewentualnego rozprzestrzeniania się wykrytej awarii.
tryb serwisowy naszego Przekaźnika Elektronicznegoumożliwia łatwą diagnostykę sterowanego obwodu, niezależnie od stanu na wejściu sterującym, a tym samym niezależnie od sterownika maszyny.
Na życzenie Klienta zaprojektujemy i wykonamy przekaźniki o innych parametrach i funkcjach użytkowych.
Sposób podłączenia i sygnalizacja
Przekaźnik włączamy w szereg obwodu zasilania grzałki pomiędzy zaciski L1 i G1. Nie jest wymagane dołączanie zacisku „N” obwodu zasilania grzałki, co upraszcza aplikację.
Dla poprawnej pracy Przekaźnik wymaga zasilania 24VDC, które należy podłączyć zgodnie z opisem do zacisków 0V i 24V. Obecność tego napięcia oraz poprawną pracę Przekaźnika sygnalizuje zielona dioda oznaczona jako RUN.
Sterowanie załączeniem Przekaźnika odbywa się poprzez podanie napięcia 24V na wejście sterujące IN1, co sygnalizuje kontrolka żółta IN1. Natomiast dioda oznaczona jako SSR, także w kolorze żółtym, sygnalizuje „zasterowanie” elementu mocy i tym samym załączenie obwodu zasilania grzałki. W prostym trybie sterowania, kontrolki IN1i SSR zaświecają się prawie jednocześnie.
Wyjście OUT, na którym pojawia się napięcie +24V ma wydajność prądową ok. 200mA, co pozwala na bezpośrednie dołączenie go do zacisków cewki (A1,A2) dowolnego przekaźnika elektromechanicznego lub bezpośrednio do wejścia sterownika maszyny odpowiedzialnego za reakcję na stan awaryjny systemu grzania. Aktywność tego wyjścia sygnalizuje czerwona dioda ERR. Wyjście OUT może być łączone równolegle razem z wyjściami OUT innych przekaźników kolejnych sekcji grzania maszyny (o ile one również są wyposażone w Przekaźniki Elektroniczne naszej produkcji). W takim przypadku przejście w stan aktywny dowolnego z tych wyjść jest równoznaczne ze stanem alarmu.
Wejście IN2 jest wejściem dodatkowym, blokującym oraz umożliwiającym rozpoczęcie pracy softstartu i powinno być dołączone do napięcia +24VDC, które pojawia się jednocześnie z zasianiem głównym obwodów grzania maszyny (np. do A1-A2 stycznika trójfazowego załączającego zasilanie stref grzania). Zanik napięcia na wejściu IN2 wyłącza Przekaźnik Elektroniczny wprowadzając go w stan oczekiwania, przy czym sygnalizacja awarii: czerwona dioda ERR i wyjście OUT, nie są uaktywniane.
Kontrolka niebieska SOFT sygnalizuje pracę w trybie Softstartu.
Tryby pracy
Przy pomocy zespołu przełączników SW Mode (tzw. „dip-switch”) możliwe jest ustawienie jednego z poniższych trybów pracy:
Sterowanie proste – wejście IN1 pobudza bezpośrednio element mocy i obwód zasilania grzałki zostaje zamknięty. Dzięki minimalnym opóźnieniom wejścia IN1 realizowana jest eliminacja krótkich, pasożytniczych sygnałów sterujących pochodzących np. od sterownika maszyny, którego elementem wykonawczym jest przekaźnik elektromechaniczny stosowany zazwyczaj w starszych typach sterowników.
Softstart krótki – po załączeniu zasilania (24V) oraz podaniu 24V na wejściu IN2 Przekaźnik Elektroniczny pracuje w trybie Softstartu przez okres ok.1 minuty *, po czym przechodzi w tryb sterowania prostego.
Softstart długi – j.w. tylko czas pracy w trybie Softstartu wynosi ok. 8 minut. *
Tryb serwisowy – w trybie tym możliwe jest zamknięcie obwodu SSR („zasterowanie” elementu mocy) niezależnie od stanu na wejściu sterującym IN1 oraz IN2. Załączenie to odbywa się poprzez przełączenie SW1 w pozycję On, a wyłączenie w pozycję Off. W tym trybie na stałe pobudzone jest wyjście OUT, co sygnalizuje dioda ERR.
*) Podane czasy mogą być dobierane w trakcie uruchamiana urządzenia na maszynie i na życzenie Klienta.
Zmiana trybów pracy jest możliwa po wykonaniu resetu Przekaźnika np. poprzez odłączenie napięcia zasilania 24V . Wyjątek stanowi wyjście z trybu serwisowego, które odbywa się natychmiast po zmianie ustawień przełącznika SW Mode.
Firma ELEKTRONIKA SERWIS projektuje i wykonuje urządzenia elektroniczne według indywidualnych potrzeb Klientów.
Informacje i zamówienia dostępne są drogą telefoniczną lub e-mailem. Zapraszamy !
NINIEJSZA STRONA KORZYSTA Z PLIKÓW COOKIE.
Wykorzystujemy pliki cookie do spersonalizowania treści i reklam oraz aby analizować ruch w naszej witrynie.