Kasowanie programu / przywracanie ustawień fabrycznych / upgrade firmware’u HMI
Jeśli masz problem z panelem OP177B i nie wiesz jak wykonać wymienione w tytule operacje, ten artykuł jest właśnie dla Ciebie. Panele HMI, ba nie tylko one, są zaprojektowane w taki sposób i posiadają tak nieczytelną i zawiłą dokumentację, że w zasadzie jedynie prawdziwy GURU po wielu masakrycznie drogich kursach i wielu set godzinach potrafi połapać się w ich obsłudze, że o programowaniu nie wspomnę.
Przeciętny automatyk w firmie korzystającej z paneli SIEMENSa nie wgłębiając się w powyższe zawiłości ogranicza się w końcu do kilku podstawowych czynności naprawczych:
Wgranie nowego oprogramowania
Usunięcie istniejącego projektu
Przywrócenie panela do stanu fabrycznego
Wykonanie upgrade’u systemu
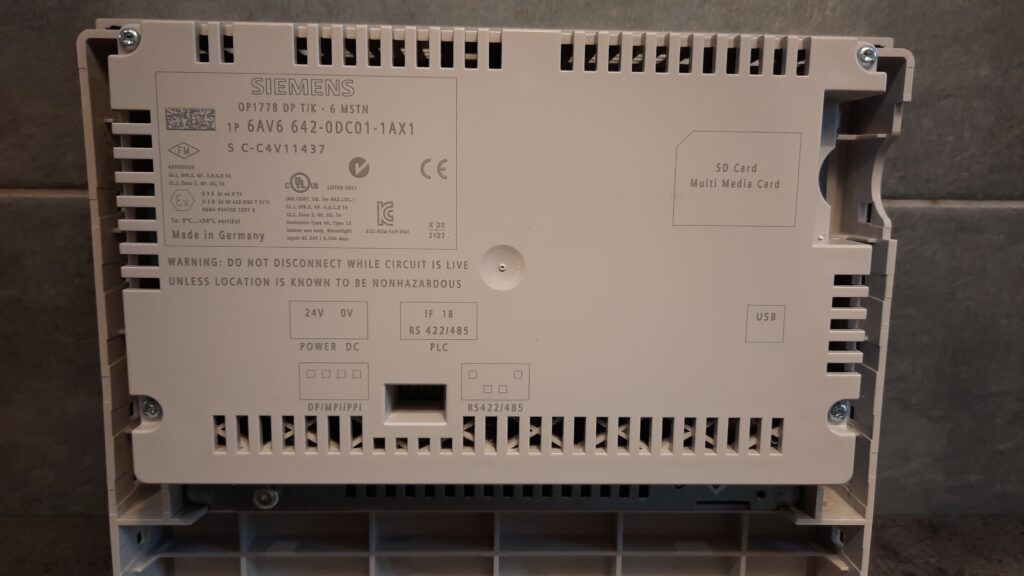
Panele OP177B nie są już produkowane, przynajmniej w wersji, o której tu mowa, jest ich jednak jeszcze wiele w eksploatowanych maszynach, a ze względu na swój leciwy rodowód ich obsługa nie jest taka oczywista.
Przechodzimy do sedna – komunikacja.
Aby wykonać czynności obsługowe wymienione wyżej należy najpierw zestawić komunikację pomiędzy komputerem PC a panelem. Można by pisać wiele na temat tego, wydawałoby się obecnie, prostego zadania, gdyż panel OP177B posiada co najmniej kilka mniej lub bardziej pewnych sposobów komunikowania się z otoczeniem. Na szczęście istnieje coś takiego jak komunikacja serwisowa i jak na razie jest to jedyny wypróbowany sposób, który tutaj użyjemy aby zestawić ze sobą komputer PC i panel Siemensa. Potrzebować będziemy w tym celu dedykowany do urządzeń Siemensa kabel komunikacyjny PPI z wtykami D-SUB9 po stronie panela i USB po stronie komputera PC. Najlepszy byłby oczywiście oryginalny kabel Siemensowski, ale ja zadowoliłem się chińską podróbką. Po podłączeniu kabla do komputerowego USB może się okazać, że nasz WIN10 (lub podobny system Windows) wykrywa urządzenie jako nieznane (lub w nazwie znajduje się informacja o konieczności skontaktowania się z producentem). Aby opanować sytuację należy oczywiście użyć opcji „Aktualizuj sterownik” i podstawić uprzednio przygotowany pakiet sterownika, ja użyłem ten o nazwie „Prolific PL2303 driver v3.3.2.102 (2008-24-09) Win8_x64_x86”. Po aktualizacji interfejs naszego kabla jest wykrywany poprawnie, tym razem jako „Prolific USB-to-Serial Comm Port (COMx)”, czyli SIEMENS PPI.
Oprogramowanie.
Na naszym pececie należy zainstalować również program do obsługi panela. Ja skorzystałem z „Simatic PRO-SAVE”, który jest częścią pakietu TIA Portal i chyba jako jedyny nadaje się do naszych celów.
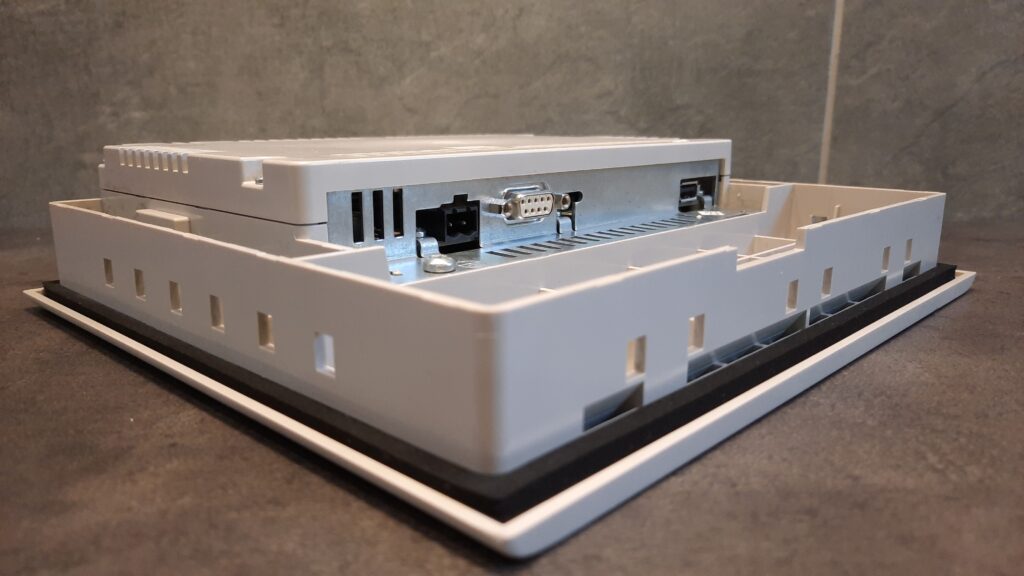
W panelu OP wszystkie DIP-Switche dostępne na tylnej ściance ustawiamy na „0=OFF” i włączamy zasilanie panela.
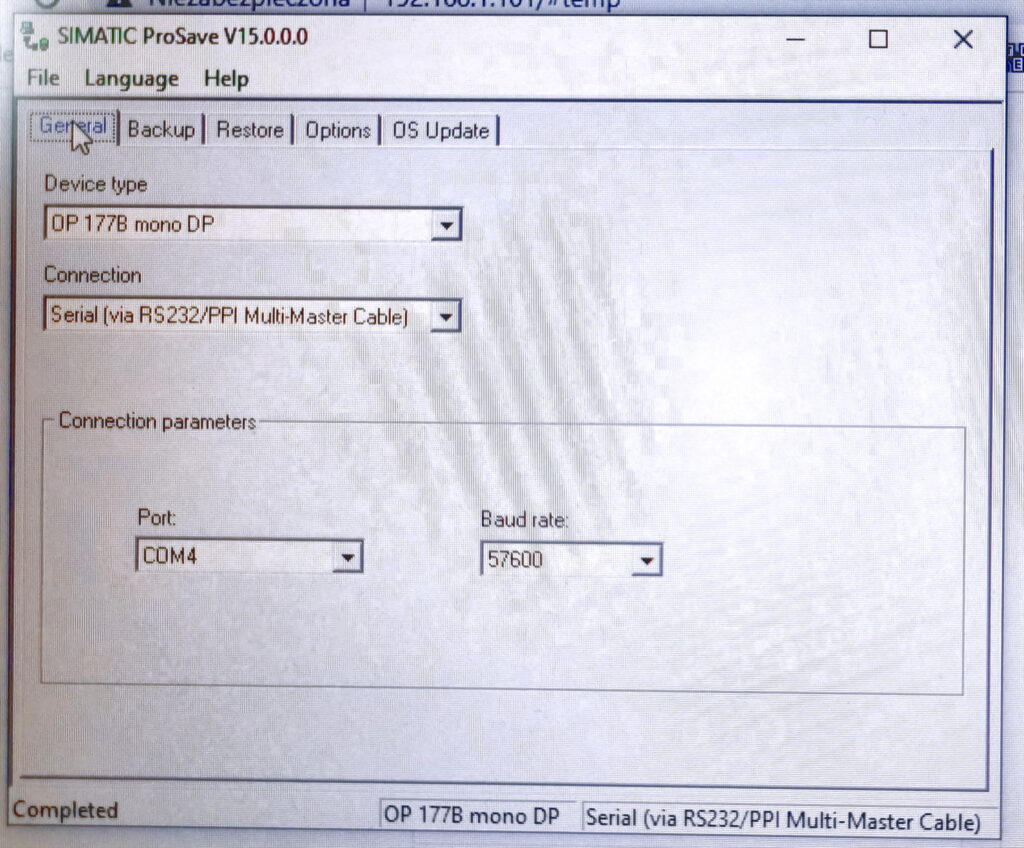
W PC uruchamiamy uprzednio zainstalowany program („WinMenuSTART->Siemens Automation/Simatic PRO-SAVE”) i w jego zakładce „General” ustawiamy następujące parametry: – Device type: OP 177B mono DP – Connection: Serial (via RS232/PPI Multi-Master Cable) – Baud rate: 57600 kb/s – Port: właściwy port dla urządzenia USB (Prolific USB-to-Serial Comm Port)
Następnie przechodzimy do zakładki „OS Update” gdzie najpierw podajemy ścieżkę do pliku .img świeżego systemu kasowanego lub upgrade’owanego panela. U mnie przykładowo jest to: „C:\Program Files\Siemens\Automation\Portal V15\Data\Hmi\Transfer\12.0\Images\Mobile_177\Mobile_177_V12_0_1_0.img”, lecz pewnie w sieci są jeszcze inne pliki.
UWAGA: Należy pamiętać aby nie zaznaczać pola „RESET”, w zakładce „OS Update”.
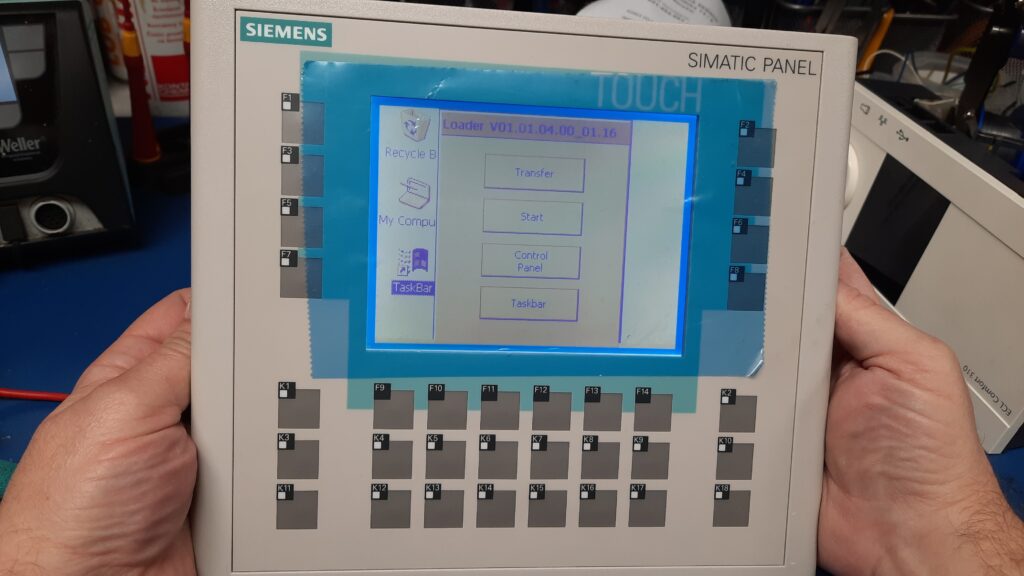
3,2,1… START !
Proces przywracania nastaw fabrycznych panela łącznie z usuwaniem istniejącego w pamięci projektu rozpoczyna się po wybraniu przycisku „Update”. Operacja ta, ze względu na niezbyt szybką komunikację może trwać poważne kilkanaście minut.
Sprawdziłeś swój falownik, wydaje się sprawny lecz silnik nadal nie rusza? Co gorsza falownik został sprawdzony w serwisie lub podmieniłeś go na zupełnie taki sam, nie wiesz co robić? Zanim wyrwiesz już wszystkie włosy z głowy i przyznasz się do porażki, przeczytaj kilka porad i spróbuj wykonać kilka prostych pomiarów, które być może ocalą Cię od niechybnej łysiny a Twój przełożony na pewno nie pominie Cię w następnym przeszeregowaniu.
Poniżej została omówiona diagnoza napędów z falownikami, czyli pomiarów diagnostycznych otoczenia falownika w celu ustalenia błędów w funkcjonowaniu napędu. Artykuł dotyczy napędów z klasycznymi bezkomutatorowymi silnikami 3 fazowymi z uzwojeniem stojana. Należy pamiętać, że znakomita większość uszkodzeń samych falowników jest spowodowana problemami w jego zasilaniu lub obciążeniu. W tym ostatnim przypadku w grę wchodzi wadliwe lub uszkodzone okablowanie lub też silnik.
Zanim jednak przystąpisz do działania, postaraj się przeczytać cały artykuł i odpowiedz sobie na pytanie, czy jesteś w stanie wykonać wszystko co tu opisałem, zachowując przy tym warunki bezpieczeństwa ludzi i sprzętu.
Nie muszę tutaj chyba przypominać, że wszelkie prace na urządzeniach elektrycznych winna przeprowadzać osoba przeszkolona, posiadająca odpowiednie świadectwo kwalifikacyjne, np. uprawnienia SEP.
Artykuł dotyczy większości klasycznych napędów opartych na pojedynczym zestawie: falownik – silnik 3 fazowy, ale równie dobrze może odnosić się do bardziej złożonych i nietypowych implementacji falowników / inwerterów / przemienników częstotliwości a nawet serwoinwerterów / serwowzmacniaczy / serwodriverów przystosowanych do pracy z zasilaniem jedno- lub trójfazowym. Może się jednak zdarzyć, że będziesz miał do czynienia z tak nietypowymi rozwiązaniami układowymi, które wykluczają wykonanie opisanych przeze mnie działań.
Diagnoza napędów z falownikami – Otoczenie falownika
Kiedy należy wykonać omówioną tutaj diagnozę napędów z falownikami ?
W sytuacjach kiedy podejrzenia wadliwej pracy napędu lub falownika padają na okablowanie lub silnik albo aby wyeliminować silnik i kable jako potencjalną przyczynę problemów. Diagnoza opisana poniżej jest niezbędna zawsze kiedy ustalono wcześniej (np. przy pomocy pomiarów opisanych w artykule pt. „Szybkie sprawdzenie falownika„) uszkodzenie falownika z powodu przeciążenia lub zwarcia na jego wyjściu. W takim przypadku podłączenie nowego falownika lub falownika po naprawie może spowodować ponowne jego uszkodzenie.
Narzędzia i przyrządy
Przed przystąpieniem do prac należy przygotować podstawowe narzędzia elektromonterskie oraz przyrząd pomiarowy. Będziemy korzystać z miernika uniwersalnego przystosowanego do prowadzenia pomiarów napięcia sieci zasilającej o zakresie minimum do 450VAC (600VDC). Warto zwrócić uwagę, czy zarówno narzędzia jak i osprzęt pomiarowy (kable, sondy mierników) posiadają certyfikat bezpieczeństwa do pracy na napięciu co najmniej 1kV.
Oprócz miernika uniwersalnego będziemy potrzebować urządzenia pomiarowego o znacznie bardziej zaawansowanej obsłudze, jakim jest miernik rezystancji izolacji. Dla wiarygodnych pomiarów wystarczy już nawet najprostszy i najtańszy, sprawny technicznie miernik tego typu, np. MIC10 firmy SONEL (https://e-mierniki.pl/p/miernik-rezystancji-izolacji-sonel-mic-10) wraz z dedykowanym wyposażeniem. Ten miernik potrafi również z powodzeniem zastąpić miernik uniwersalny, o którym mowa wcześniej. Oczywiście każdy inny miernik rezystancji izolacji również będzie nadawał się do pomiarów pokazanych w dalszej części artykułu. Przed przystąpieniem do pracy z przyrządami pomiarowymi należy bezwzględnie zapoznać się z fabrycznymi instrukcjami obsługi tych przyrządów i szczegółowo je stosować podczas prowadzenia pomiarów.
Bezpieczeństwo
Przed przystąpieniem do prac zadbaj bezwzględnie o warunki bezpieczeństwa na stanowisku, m.in. zlokalizuj wyłącznik główny zasilania napędu (maszyny), miejsce przechowywania środków gaśniczych oraz zapewnij sobie łączność z odpowiednimi służbami na wypadek np. porażenia prądem (prace pomiarowe prowadzone pod napięciem najlepiej wykonywać w co najmniej 2 osoby, przy czym druga osoba powinna znajdować się poza wygrodzonym polem operacyjnym, w pewnej odległości od prowadzonych prac i pełnić rolę asekuracyjną.
Przygotowanie
Prace diagnostyczne dla ułatwienia podzielimy na następujące części:
Pomiary napięcia zasilania (prace pod niebezpiecznym napięciem sieciowym),
Pomiary napięć sterowania (prace pod napięciem bezpiecznym),
Pomiary okablowania silnika (prace beznapięciowe),
Pomiary silnika
Diagnoza napędów z falownikami – Diagram
ad.1.Pomiary napięcia zasilania. Przy pomocy miernika uniwersalnego mierzymy napięcie zasilania falownika (AC) oraz napięcie stałe (DC) pomiędzy zaciskami B- i B+ falownika, jeśli takie są wyprowadzone w danego typu urządzeniach. Podczas prowadzenia pomiarów falownik powinien być podłączony w swoim standardowym układzie zasilania i znajdować się w trybie STOP, jednocześnie okablowanie silnika oraz silnik powinny być również dołączone tak jak w normalnym toku pracy napędu.
Poniżej przedstawiamy pomiary i ich wyniki przy założeniu, że napęd korzysta ze standardowego zasilania jedno lub trójfazowego. Prawidłowe napięcie zasilania, do którego przystosowany jest mierzony falownik należy każdorazowo sprawdzić na jego tabliczce znamionowej lub też w odnośnej dokumentacji technicznej.
A. Dla falowników z zasilaniem jednofazowym wykonujemy następujące pomiary:
Zaciski falownika
Zakres
Oczekiwane napięcie
L1 / N
>=250VAC
230VAC
B- / B+
600VDC
325VDC
B. Dla falowników z zasilaniem trójfazowym pomiary wyglądają następująco:
Zaciski falownika
Zakres
Oczekiwane napięcie
L1 / L2
>=600VAC
400VAC
L1 / L3
>=600VAC
400VAC
L2 / L3
>=600VAC
400VAC
B- / B+
1000VDC
565VDC
C. Dla niektórych falowników (zwłaszcza serwoinwerterów) niezbędne jest wykonanie dodatkowego pomiaru napięcia zasilania układów sterowania falownika zasilaniem jednofazowym. W takim przypadku wykonujemy pomiary:
Zaciski falownika
Zakres
Oczekiwane napięcie
L1 / N
>=250VAC
230VAC
Znaczące różnice otrzymanych pomiarów świadczą o nieprawidłowym zasilaniu falownika lub o jego uszkodzeniu, co prawie na pewno jest skutkiem nieprawidłowego działania napędu. Częstą przyczyną braku prawidłowego zasilania lub w układach zasilania trójfazowego braku symetrii faz, jest okablowanie albo też włączone w obwód łączniki takie jak: wyłączniki mechaniczne, styczniki zabezpieczające (odłączające zasilanie falownika w wypadku niepoprawnej pracy maszyny). Elementy te należy zbadać lub w przypadku wątpliwości, wymienić na nowe.
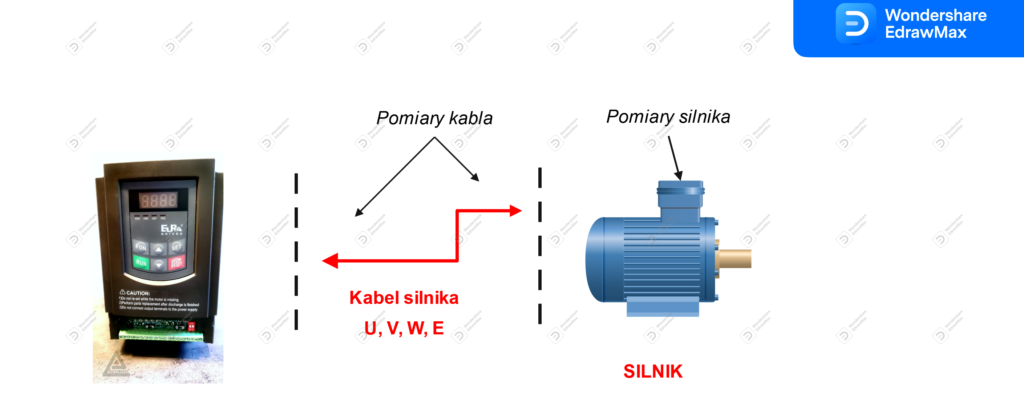
Diagnoza napędów z falownikami – Separacja elektryczna kabla do pomiarów.
ad.3.Pomiary okablowania silnika.
Ponieważ prace te będą wykonywane w stanie beznapięciowym (aczkolwiek podczas pomiaru mogą występować krótkotrwale wysokie napięcia, których skutkiem działania może być uszkodzenie falownika, postępuj następująco:
Odłącz zasilanie falownika wyłącznikiem sieciowym (głównym) maszyny oraz upewnij się, używając posiadanego miernika lub specjalnego testera, czy na przyłączach falownika nie występuje potencjał elektryczny.
Odczekaj koniecznie czas potrzebny na rozładowanie się kondensatorów wysokonapięciowych ! Czas ten jest zwykle określony przez producenta i oznaczony na obudowie falownika lub zamieszczony w jego dokumentacji. Niektóre urządzenia posiadają też odpowiednio oznaczoną, zazwyczaj czerwoną, kontrolkę informującą o obecności napięcia na kondensatorach falownika.
Jeśli nie wiesz ile czasu powinieneś odczekać przed przystąpieniem do dalszych prac, załóż bezpieczny czas np. 30 minut. Dla falowników dużej mocy, czas powinien być odpowiednio dłuższy. Możesz również zmierzyć napięcie pomiędzy zaciskami falownika oznaczanymi zwykle P+ i P- (jeśli Twój falownik takie posiada), jest to napięcie występujące na baterii kondensatorów wysokonapięciowych. Jeśli napięcie to jest większe niż kilka voltów, odczekaj do momentu jego bezpiecznego samoczynnego obniżenia (rozładowania się kondensatorów). Uwaga: Całkowity brak mierzonego napięcia może być również efektem niesprawności falownika, w takim przypadku zaleca się specjalną ostrożność.
Pamiętaj:Prace pomiarowe silnika i jego okablowania możesz prowadzić jedynie przy stanie beznapięciowym na wszystkich zaciskach falownika oraz gdy kable są odłączone od falownika !
Teraz w falowniku odłącz przewody elektryczne od strony zacisków kabla silnika (zazwyczaj są one oznaczane jako „U”, „V”, „W” ale spotykane są inne oznaczenia np. „MOTOR”) aby „uwolnić elektrycznie” kabel silnika od falownika. Nie zapomnij również o odłączeniu ekranowania (oplotu) kabla oraz przewodu PE od zacisków falownika. Pozostałe przewody, w tym przewody zasilające falownik, przewody PE uziemiające falownik od strony zasilania oraz przewody podłączone do zacisków niskonapięciowych sterowania, mogą pozostać podłączone.
Następnie otwórz puszkę osłony kabla znajdująca się zazwyczaj na korpusie silnika i odłącz wszystkie przewody kabla silnika (U, V, W, PE) a sam kabel wysuń z dławika tak, aby odizolować również ekran (oplot) kabla od części metalowych obudowy silnika. Odłączone końcówki przewodu oraz jego oplot powinny być zaizolowane na czas pomiaru i powinny się znajdować maksymalnie daleko od siebie i od innych części metalowych (np. korpusu silnika). W niektórych napędach silniki posiadają specjalne hermetyczne przyłącze w postaci gniazda (wtyk znajduje się na kablu silnika), w takim przypadku wystarczy rozłączyć trwale to przyłącze.
Jeśli napęd posiada enkoder lub resolver, zwłaszcza gdy jego okablowanie przebiega razem z kablem zasilania silnika, należy postępować identycznie, jak w przypadku kabla silnika, tzn. odłączyć obustronnie przewody (kabel) enkodera wraz z oplotem. Podczas wykonywania pomiarów, w kablach m.in enkodera mogą się wyindukować prądy szkodliwe dla obwodów falownika.
Sprawdź czy na pewno dobrze wykonałeś powyższe zadania, w przeciwnym wypadku wyniki pomiarów mogą być błędne a Twój falownik i/lub sam przyrząd pomiarowy będą narażone na poważne uszkodzenia.
Pamiętaj:Podczas wykonywania pomiarów rezystancji izolacji na poszczególnych zaciskach pomiarowych oraz na wolnych końcówkach kabla i samym kablu może pojawić się chwilowo wysokie napięcie. Zachowaj Ostrożność !
Pomiary Izolacji. Do odizolowanych przewodów kabla silnika po stronie falownika podłączamy teraz sondy pomiarowe miernika izolacji i wykonujemy następujące pomiary:
Przewody Kabla Silnika
Oczekiwane pomiary rezystancji izolacji
U / V *
>20MΩ
U / W *
>20MΩ
V / W *
>20MΩ
* – biegunowość podłączeń sond pomiarowych nie ma znaczenia chyba, że jest to opisane w dokumentacji posiadanego przyrządu pomiarowego
Następnie podłączamy sondy pomiarowe miernika izolacji pomiędzy oplot (ekran) kabla (w drugim pomiarze jest to przewód PE) a zwarte ze sobą przewody zasilania silnika w taki sposób by dodatnia elektroda pomiarowa była przyłączona do ekranu lub końcówki przewodu PE kabla. Pomiary wykonujemy wg. poniższej tabeli:
Przewody Kabla Silnika
Oczekiwane pomiary rezystancji izolacji
(+)E / (-) U+V+W *
>20MΩ
(+)PE / (-) U+V+W *
>20MΩ
* – przewody zasilające są zwarte ze sobą, a ekran kabla „E” lub przewód PE podłączone są do dodatniej sondy pomiarowej (właściwą biegunowość należy sprawdzić w dokumentacji posiadanego przyrządu pomiarowego)
Dla pewności powyższe pomiary możemy wykonać kilkakrotnie, w tym również od strony kabla podłączanej do zacisków silnika.
Znaczące różnice każdego z otrzymanych pomiarów od wartości oczekiwanych, świadczą o uszkodzonym kablu silnika, który to kabel bezwzględnie należy wymienić w całości na nowy.
Uwaga: Jeśli producent urządzenia pomiarowego nakazuje inną konfigurację pomiarową dla kabli elektrycznych, należy bezwzględnie stosować zalecenia zawarte w fabrycznej instrukcji obsługi stosowanego miernika izolacji.
Diagnoza napędów z falownikami – Silnik
ad.4.Pomiary silnika.
Pomiary te dzielimy na: A. sprawdzenie rezystancji uzwojeń silnika, B. pomiar izolacji uzwojeń, C. pomiar izolacji silnika
Pamiętaj:Wszystkie pomiary silnika wykonywane są w stanie beznapięciowym. Podczas wykonywania tych pomiarów bezwzględnie kabel zasilania silnika musi być od niego odłączony, w przeciwnym wypadku może dojść do niebezpieczeństwa porażenia lub uszkodzeń napędu !
ad.4.APomiar rezystancji uzwojeń silnika.
Pomiar rezystancji uzwojeń silnika wykonujemy zazwyczaj przyrządem pomiarowym ustawionym na zakres pomiaru rezystancji poniżej 1Ω. Najlepsze do tego celu są dedykowane przyrządy pomiarowe posiadające tzw. mostki do pomiaru rezystancji, które posiadają możliwość pomiaru 4ro przewodowego. W ostateczności jednak możemy posłużyć się miernikiem uniwersalnym oferującym jedynie 2 przewodowy pomiar rezystancji i najmniejszy zakres 10Ω, należy jednak wziąć pod uwagę uchyb jakim obarczony będzie wykonany w ten sposób pomiar.
Pomiary Rezystancji. Do odpowiednich zacisków silnika podłączamy sondy pomiarowe i wykonujemy następujące pomiary:
Zaciski Silnika
Oczekiwane pomiary rezystancji uzwojeń silnika
U / V *
<<1Ω**
U / W *
<<1Ω**
V / W *
<<1Ω**
* – podłączenia sond pomiarowych należy dokonać w sposób opisany w dokumentacji posiadanego przyrządu pomiarowego ** – zmierzona rezystancja przy silniku z uzwojeniami połączonymi w gwiazdę powinna być równa dwukrotnej rezystancji uzwojenia podanej w ma tabliczce znamionowej lub w dokumentacji ruchowej silnika. W przypadku kiedy uzwojenia są połączone w trójkąt, zmierzona rezystancja jest równa Rz=2/3 * R = 0,67 R, gdzie R jest rezystancją pojedynczego uzwojenia.
Znaczące różnice otrzymanych pomiarów zarówno między sobą, jak i od wartości oczekiwanych świadczą o uszkodzonym uzwojeniu silnika. W takim wypadku silnik należy oddać do specjalistycznego serwisu lub wymienić na nowy, sprawdzony.
ad.4.BPomiar izolacji uzwojeń silnika.
Aby wykonać pomiar rezystancji izolacji uzwojeń silnika trójfazowego należy w puszce łączeniowej na silniku wyizolować 6 zacisków trzech uzwojeń silnika (U1, U2, V1, V2, W1, W3). Można to wykonać zdejmując łączówki ustalające układ połączeń silnika (gwiazda / trójkąt), odkręcając uprzednio nakrętki je mocujące. W przypadku, gdy silnik nie jest wyposażony w opisane wcześniej łączówki (połączenia uzwojeń dokonano na stałe), pomiarów nie da się wykonać i należy przejść do następnego punktu 4.C. Pomiaru rezystancji izolacji uzwojeń dokonujemy odpowiednim przyrządem w sposób opisany w tabeli poniżej, tzn. do jednego z zacisków przyrządu podłączamy zwarte ze sobą obydwie końcówki (U1 i U2) uzwojenia U, do drugiego zacisku zwarte ze sobą końcówki (V1 i V2) uzwojenia V itd.:
Zaciski Uzwojeń Silnika
Oczekiwane pomiary rezystancji izolacji
U1+U2 / V1+V2 *
>20MΩ
U1+U2 / W1+W2 *
>20MΩ
V1+V2 / W1+W2 *
>20MΩ
* – biegunowość podłączeń sond pomiarowych nie ma znaczenia chyba, że jest to inaczej opisane w dokumentacji posiadanego przyrządu pomiarowego
Znaczące różnice otrzymanych pomiarów zarówno między sobą, jak i od wartości oczekiwanych świadczą o uszkodzonej izolacji uzwojeń silnika. W takim wypadku silnik należy oddać do specjalistycznego serwisu lub wymienić na nowy, sprawdzony.
ad.4.CPomiar izolacji silnika.
Pomiaru rezystancji izolacji uzwojeń dokonujemy odpowiednim przyrządem w sposób opisany w tabeli poniżej, tzn. do jednego z zacisków przyrządu podłączamy zwarte ze sobą wszystkie zaciski silnika (U, V i W), drugi zacisk przyrządu podłączamy w miejscu odizolowanym do obudowy (korpusu) silnika, jak to jest opisane niżej:
Zaciski Silnika
Oczekiwane pomiary rezystancji izolacji
(+) Korpus Silnika / (-) U+V+W *
>20MΩ
* – Właściwą biegunowość sond pomiarowych należy sprawdzić w dokumentacji posiadanego przyrządu pomiarowego
Znaczące różnice otrzymanych pomiarów od wartości oczekiwanych świadczą o uszkodzonej izolacji stojana lub uzwojeń silnika. W takim wypadku silnik należy oddać do specjalistycznego serwisu lub wymienić na nowy, sprawdzony.
Dla pełnej diagnozy napędu należy wykonać również sprawdzenie falownika, w tym celu zapraszamy do przeczytania naszego artykułu „Szybkie sprawdzenie falownika„.
Pamiętaj:Nie próbuj wykonywać samodzielnie napraw, jeśli nie jesteś pewien tego co robisz. W celu zaoszczędzenia czasu i obniżenia mogących powstać w ten sposób dodatkowych kosztów, skorzystaj z wiedzy i doświadczenia wykwalifikowanego serwisu naprawczego.
Firma Elektronika Serwis ani autor tego artykułu nie ponoszą w żadnym wypadku jakiejkolwiek odpowiedzialności za powstałe w wyniku działań inspirowanych niniejszym artykułem straty materialne i/lub uszczerbek na zdrowiu.
Naprawa płyty PCB – Rekonstrukcja wielowarstwowej płyty CPU sterownika wysokiego składowania, po zalaniu wodą.
Poniżej przedstawiamy Państwu, w kilku krokach, proces naprawy płytki drukowanej zniszczonej poprzez długotrwałe utlenianie się miedzi (pot. śniedź) na skutek korozji wywołanej obecnością wody w obrębie uszkodzonego fragmentu płyty. Uszkodzenie takie, wbrew pozorom jest zjawiskiem bardzo częstym i zachodzi głównie na płytkach PCB niezabezpieczonych antyadhezyjną warstwą ochronną (np. poliurethanem), tak jak to miało miejsce właśnie w tym przypadku . Czasami również i na zabezpieczonych płytach można zaobserwować korozję na skutek długotrwałego narażenia urządzenia na nieprzyjazne środowisko o krytycznym poziomie wilgotności, w takich przypadkach dotyczy to głównie uszkodzeń powstałych w obrębie złącz, konektorów, czy innych nawet masywnych elementów, których zabezpieczenie jest utrudnione lub w ogóle nie możliwe.
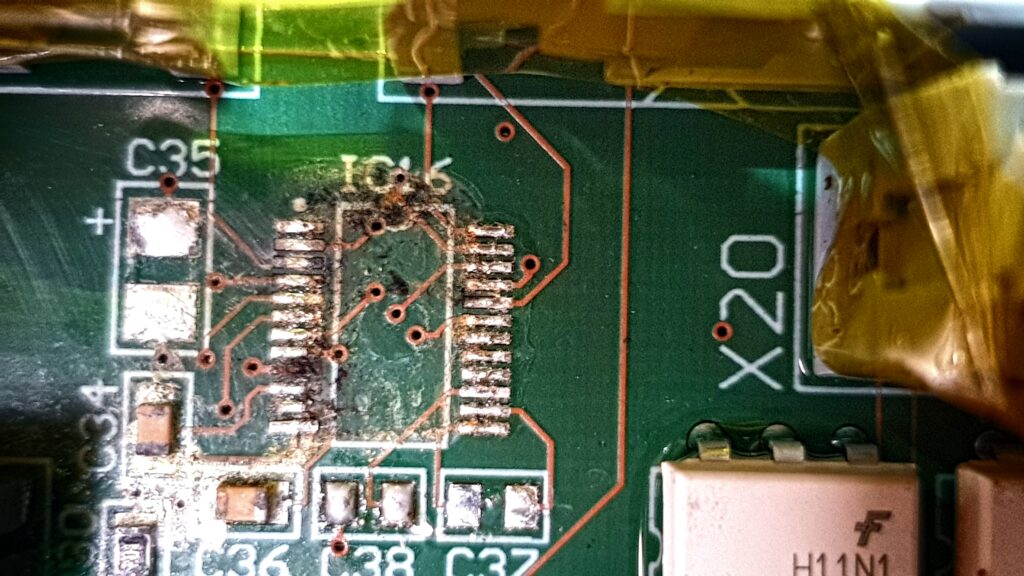
Pokazana na fot.1. płyta została przyjęta do naszego Serwisu w trybie awaryjnym, z objawem braku komunikacji CPU z otoczeniem, co zostało stwierdzone przez serwis fabryczny wezwany z powodu alarmu na panelu operatorskim maszyny i zatrzymania pracy urządzenia. Szybka diagnoza wizualna pozwoliła ustalić obszar i rodzaj uszkodzenia, co z kolei zaowocowało zaplanowaniem i podjęciem określonych czynności serwisowych zmierzających do usunięcia usterki.
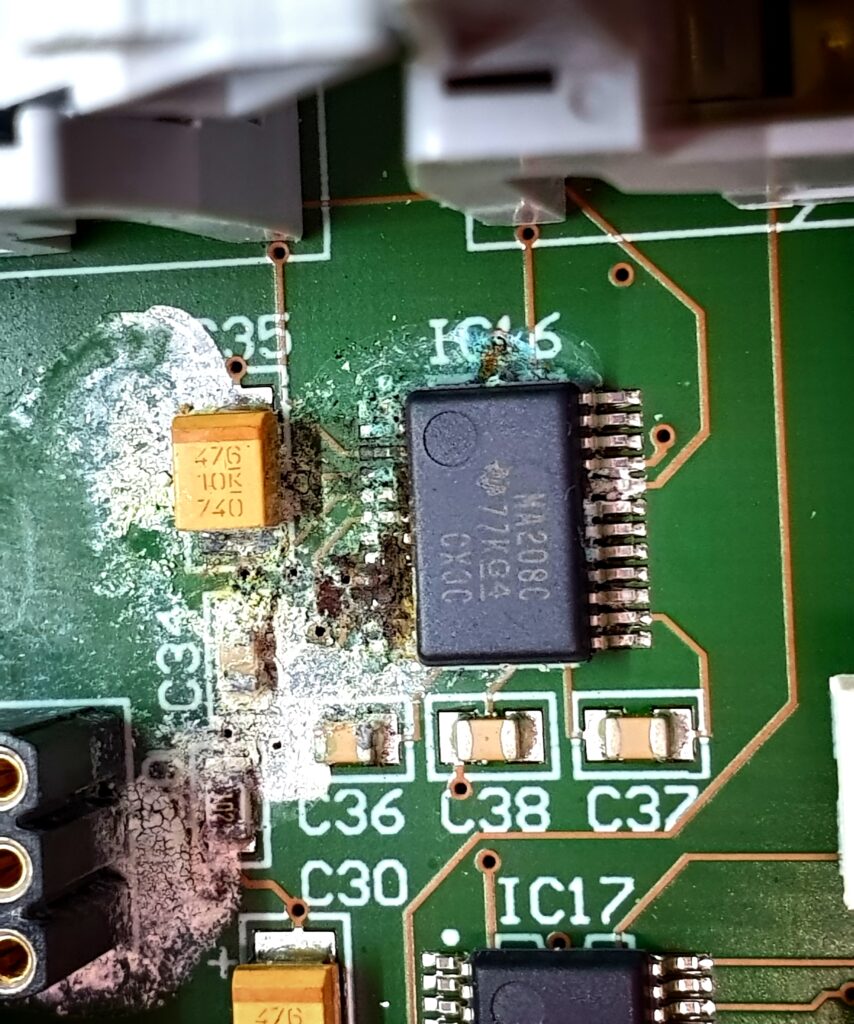
fot.1 Wygląd fragmentu płyty przed przystąpieniem do naprawy.
Jak widać powyżej, uszkodzeniu uległ układ scalony odpowiedzialny za komunikację szeregową, wraz z elementami towarzyszącymi C36-C38 oraz C34. Elementy te zostały wytypowane do wymiany, a dodatkowo wymianie muszą ulec również: kondensator filtrujący zasilanie C35 (są już na nim widoczne początki korozji), rezystor R30 oraz pobliskie 6cio pinowe złącze listwowe (i tak wymaga ono wylutowania ze względu na widoczne podcieknięcia pod jego obudowę).
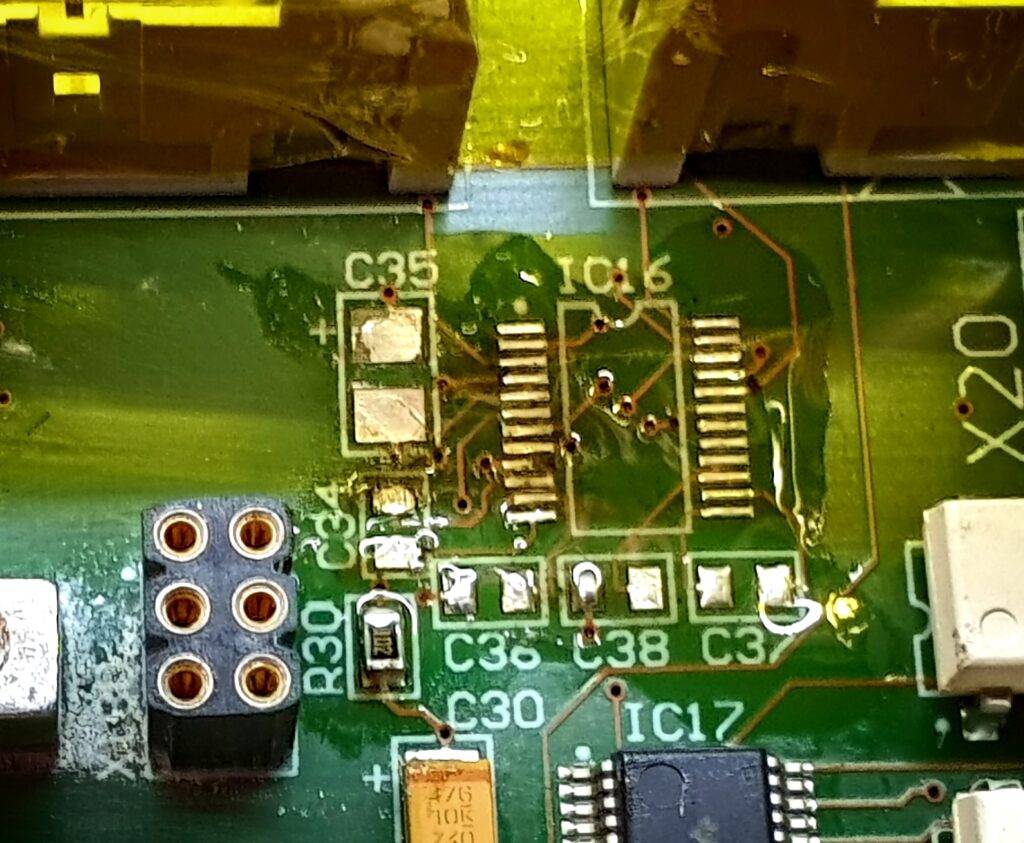
fot.2 Widok bezpośrednio po usunięciu skorodowanych elementów elektronicznych.
Fot.2 przedstawia stan płyty po usunięciu większości wytypowanych do wymiany elementów oraz zabezpieczeniu sąsiadujących fragmentów płyty (w tym delikatnych i nie odpornych na wysoką temperaturę złącz IDC) taśmą ochronną typu Capton, której zadaniem jest zabezpieczenie sprawnych elementów przed ewentualnymi uszkodzeniami, głównie termicznymi, podczas np. lutowania gorącym powietrzem. Na fot.3 dodatkowo możemy zauważyć liczne wżery i uszkodzenia skorodowanych padów (punktów lutowniczych elementów SMD), których sprawność i właściwości elektryczne zostaną przywrócone w toku dalszych czynności naprawczych.
fot.3 Układ ścieżek i padów przygotowany do wlutowania nowych części.
Na fot.3 widzimy już zrekonstruowane pady większości podlegających wymianie elementów. Całość powleczona została odpowiednim fluxem żelowym a pady przygotowane do lutowania na nich nowych części. Zarówno wylutowanie uszkodzonych, jak i wlutowanie nowych elementów elektronicznych SMD odbywało się techniką mieszaną. Wykorzystano do tego celu zarówno lutownicę grzałkową małej mocy wyposażoną w grot szpilkowy (igłowy) o średnicy końcówki mniejszej niż 0,2mm, jak i technikę lutowania gorącym powietrzem (hot-air) z dyszą okrągłą o standardowej średnicy, stacja wyposażona jest w stabilizację temperatury i przepływu. Wylutowanie 6cio pinowego złącza listwowego zostało zrealizowane przy pomocy lutownicy grzałkowej z grotem typu „wkrętak” (szerokość płetwy 1,2mm) oraz odsysacza automatycznego Weller z końcówką o średnicy 2,5mm. W procesie wylutowywania użyto również preheatera (podgrzewacza na podczerwień) o temperaturze procesu ok. 200st.C. Użycie tego narzędzia było wygodne z uwagi na brak elementów SMD na płycie od jej dolnej strony (bottom), co znacznie przyśpieszyło proces. Temperatura procesu górnej warstwy płyty (warstwa elementów – top) zarówno przy wylutowywaniu, jak i wlutowywaniu elementów, nie przekraczała 440st.C. i była podyktowana pracą ze spoiwem bezołowiowym, którym była fabrycznie zlutowana naprawiana płyta. Podczas reworkingu (wymiany uszkodzonych części) użyta została cyna z dodatkiem ołowiu, typu „tinol” i temperaturze pracy 325st.C, co jest zgodne z dyrektywą RoHS, która dopuszcza użycie takiej cyny w procesach naprawczych elektroniki.
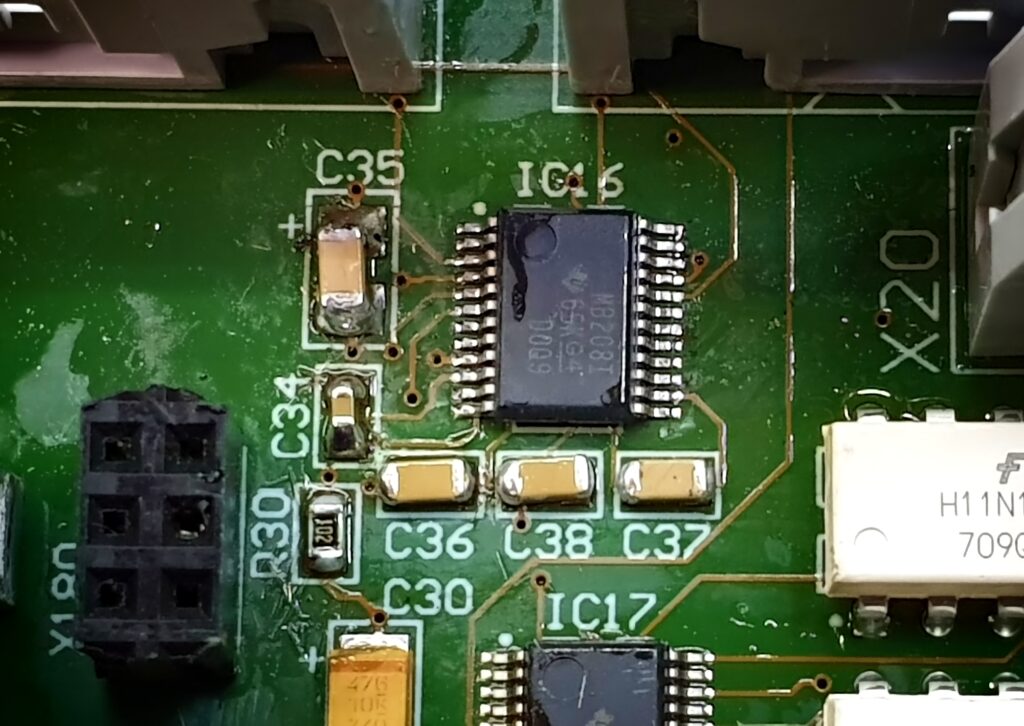
fot.4 Widok płyty po naprawie.
Na fotografii powyżej widać płytę po wlutowaniu elementów, wykonaniu wstępnego mycia nadmiaru fluxa oraz sprawdzeniu połączeń elektrycznych. Zostało, jak widać, wlutowane także nowe gniazdo listwowe, a taśma ochraniająca (Capton) została już usunięta. Po dokładnym ponownym umyciu i osuszeniu płyty, będzie ona gotowa do testów funkcjonalnych przeprowadzonych w warunkach warsztatowych, przed odesłaniem do Klienta w celu uruchomienia na maszynie.
Firma Elektronika Serwis wykonuje naprawy i rekonstrukcje niektórych płyt PCB wykonanych w technologii SMD, THT oraz mieszanej.
Należy pamiętać jednak, że nie wszystkie rodzaje uszkodzeń takiej płyty są możliwe do naprawy i przy tym opłacalne ekonomicznie. Głównymi przyczynami niezakwalifikowania do serwisu są: – uszkodzenia elementów uniemożliwiające ich identyfikację, w których mimo analizy układu i na podstawie własnego doświadczenia, nie jesteśmy w stanie określić typu uszkodzonej części. – uszkodzenia przelotek (vias) na płytach wielowarstwowych, gdzie uszkodzeniu uległo połączenie pomiędzy jedną z warstw niewidocznych (wewnętrznych). – niektóre uszkodzenia połączeń ścieżek na którejś z warstw wewnętrznych. – masywne, rozległe uszkodzenia płyty obejmujące wiele warstw ścieżek i uszkodzenia laminatu (kanwy PCB), powstałe np. w skutek pożaru lub bardzo wysokiej temperatury działającej punktowo.
Twój falownik pokazuje błąd, wybija zabezpieczenia, nie rusza silnika ? Masz ochotę odesłać go do serwisu ? Zanim to zrobisz, warto wykonać kilka pomiarów aby uzyskać wstępną diagnozę.
falownik Goodrive
Poniżej przedstawię bardzo prostą i szybką metodę pomiarów diagnostycznych falownika w celu ustalenia jego niedomagań. Zanim jednak przystąpisz do pracy, przeczytaj cały artykuł i zastanów się, czy jesteś w stanie wykonać wszystko co tu opisałem, zachowując przy tym warunki bezpieczeństwa ludzi i sprzętu.
Artykuł dotyczy większości falowników / inwerterów / przemienników częstotliwości / serwoinwerterów / serwowzmacniaczy / serwodriwerów o konstrukcji zawierającej układ zasilania jedno- lub trójfazowy oraz układ wyjściowy mocy oparty na tranzystorach lub modułach IGBT w standardowej konfiguracji. Może się jednak zdarzyć, że będziesz miał do czynienia z nietypowymi rozwiązaniami układowymi wykluczającymi wykonanie opisanych przeze mnie pomiarów.
Narzędzia
Przed przystąpieniem do prac przygotuj podstawowe narzędzia, jak na przykład wkrętak (rozmiarem przystosowany do śrub na zaciskach mierzonego falownika). Najważniejszym jednak jest przyrząd pomiarowy. Do naszych celów wystarczy zwykły cyfrowy lub analogowy miernik uniwersalny z opcją pomiaru złącz półprzewodnikowych (zwykle jest to zakres pomiarowy oznaczony symbolem diody). Miernik powinien być wyposażony w sondy pomiarowe i co ważne, w źródło zasilania (baterię) o dobrej kondycji.
Przygotowanie
Przed przystąpieniem do prac odłącz zasilanie falownika wyłącznikiem sieciowym (głównym) maszyny oraz upewnij się, używając posiadanego miernika lub specjalnego testera, czy na przyłączach falownika nie występuje prąd elektryczny.
Odczekaj koniecznie czas potrzebny na rozładowanie się kondensatorów wysokonapięciowych ! Czas ten jest zwykle określony przez producenta i oznaczony na obudowie falownika lub zamieszczony w jego dokumentacji. Niektóre urządzenia posiadają też odpowiednio oznaczoną, zazwyczaj czerwoną, kontrolkę informującą o obecności napięcia na kondensatorach falownika.
Jeśli nie wiesz ile czasu powinieneś odczekać przed przystąpieniem do dalszych prac, załóż bezpieczny czas np. 30 minut. Dla falowników dużej mocy, czas powinien być odpowiednio dłuższy. Możesz również zmierzyć napięcie pomiędzy zaciskami falownika oznaczanymi zwykle P+ i P- (jeśli Twój falownik takie posiada), jest to napięcie występujące na baterii kondensatorów wysokonapięciowych. Jeśli napięcie to jest większe niż kilka voltów, odczekaj do momentu jego bezpiecznego samoczynnego obniżenia (rozładowania się kondensatorów). Uwaga: Całkowity brak mierzonego napięcia może być również efektem niesprawności falownika, w takim przypadku zaleca się specjalną ostrożność.
Pamiętaj:Dalsze prace możesz prowadzić jedynie przy stanie beznapięciowym na wszystkich zaciskach falownika !
Teraz odłącz wszystkie przewody elektryczne od strony zasilania oraz od strony przyłączy silnika (również te podłączone do rezystora hamującego, jeśli został zaimplementowany). Przewody PE oraz te, podłączone do zacisków niskonapięciowych sterowania mogą pozostać podłączone. Sprawdź czy na pewno dobrze wykonałeś powyższe zadanie, w przeciwnym wypadku wyniki pomiarów mogą być błędne a Twój przyrząd pomiarowy będzie narażony na uszkodzenie.
Dla pewności braku napięcia na obwodach mocy falownika i ochrony Twojego przyrządu pomiarowego, na zaciski P+ i P- falownika możesz założyć tymczasowo zworkę z odcinka przewodu lub rezystora rozładowczego o rezystancji kilka kiloomów i mocy kilku watów. Zworkę tę należy usunąć bezpośrednio przed wykonywaniem pomiarów.
Konstrukcja falownika
W naszych pomiarach traktujemy falownik jako „czarną skrzynkę”, jednak dobrze jest zapoznać się z jego ogólną konstrukcją, aby lepiej zinterpretować otrzymane wyniki.
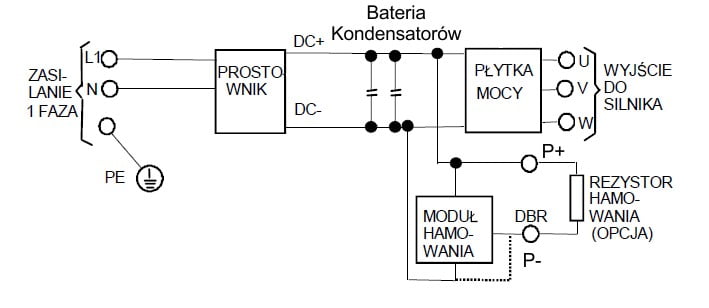
Schemat blokowy falownika (wariant uproszczony)
W znakomitej większości falowników, zwłaszcza małych i średnich mocy, możemy wyróżnić 2 główne bloki, które opiszemy w dalszej treści:
Blok wejściowy – zasilania
Blok wyjściowy – mocy
ad.1. BLOK ZASILANIA
Blok zasilania składa się zazwyczaj z filtra przeciwzakłóceniowego (czasami filtr taki stanowi oddzielony mechanicznie i elektrycznie moduł, zamontowany często pod radiatorem falownika lub obok niego), oraz obwodu prostownika 1 lub 3 fazowego i baterii kondensatorów. Prostownik w falownikach małej i średniej mocy zrealizowany jest (szczególnie w tańszych i prostszych modelach) w oparciu o standardowy diodowy, pasywny mostek Graetz’a, czasami zaś jest to mostek sterowany (prostownik aktywny) zrealizowany w oparciu o diody sterowane (tyrystory). Niezależnie od przyjętego rozwiązania, zadaniem prostownika jest zamiana przemiennego napięcia sieci dostarczonego do falownika, na napięcie stałe służące do zasilenia jego obwodów mocy.
Powstałe za prostownikiem tętnienia prądu są wygładzane za pomocą baterii kondensatorów, która to składa się z jednego lub wielu wysokonapięciowych kondensatorów elektrolitycznych. Pełni ona również bardzo ważną rolę w magazynowaniu i oddawaniu energii w trakcie normalnej pracy falownika.
W przypadku zasilania falownika z jednofazowego napięcia sieci elektroenergetycznej 230VAC, na zaciskach baterii kondensatorów filtrujących pojawia się napięcie ok. 325VDC. W przypadku zaś, kiedy urządzenie zasilane jest trójfazowo z sieci o napięciu międzyfazowym 400VAC, napięcie na kondensatorach wynosi ok. 565VDC. W praktyce, ze względu na wahania napięcia sieci, jej brak symetrii oraz jakość samych kondensatorów, powyższe napięcia mogą się różnić od wyżej podanych. Czasami falownik przystosowany jest do zasilania innymi napięciami, lecz nie ma to większego znaczenia dla naszych pomiarów.
Napięcie na baterii kondensatorów jest wyprowadzane zazwyczaj na zaciski falownika oznaczane zwykle jako P+ i P-. Niestety nie wszystkie falowniki mają je dostępne, zwłaszcza urządzenia małej mocy posiadają wyprowadzony jedynie zacisk P+. W takim przypadku nie wykonamy pełnych pomiarów chyba, że zapewnimy sobie dostęp do brakującego zacisku wewnątrz urządzenia.
W skład układu zasilania wchodzi także rezystor startowy. Szerzej o tym rezystorze można przeczytać tutaj.
Rezystor startowy jest umieszczany zwykle szeregowo pomiędzy wyjściem prostownika a baterią kondensatorów filtrujących. Ma on za zadanie ograniczenie prądu ładowania kondensatorów w fazie po włączeniu zasilania. Dzieje się tak, gdyż jego rezystancja wraz z pojemnością kondensatorów tworzą pewną stałą czasową opóźniającą ich ładowanie zmniejszonym prądem. Procesor falownika sterujący fazą rozruchu urządzenia, po określonym czasie, zwiera (zazwyczaj za pomocą stycznika) zaciski rezystora startowego eliminując tym samym jego wpływ na obwód zasilania falownika w dalszej fazie pracy. Należy pamiętać, że w konstrukcjach opartych o aktywne zespoły prostownicze (mostki tyrystorowe) rezystor startowy nie jest zwykle stosowany, gdyż sterownik prostownika odpowiednio reguluje prąd ładowania baterii kondensatorów.
W trakcie wykonywania naszych pomiarów, warto uwzględnić obecność rezystora startowego, który podczas pomiarów obwodów zasilania stanowi rezystancję szeregową.
ad.2. BLOK WYJŚCIOWY
Blok wyjściowy falowników jest zwykle zrealizowany w oparciu o moduł lub moduły zwierające tranzystory IGBT. W mniejszych falownikach spotkać można pojedyncze tranzystory IGBT, lecz jest to już coraz rzadszy przypadek. Niezależnie od konstrukcji, z punktu widzenia jego działania, blok wyjściowy ma za zadanie zamienić prąd stały dostarczony z bloku zasilania a konkretnie z jego baterii kondensatorów, na przebieg zmienny (przemienny trójfazowy). Istnieją również falowniki posiadające wyjścia jednofazowe, jednak nimi nie będziemy się tutaj zajmować, gdyż stanowią mniejszość i obejmują jedynie falowniki małych mocy. Ich pomiar jest identyczny, jak dla falowników o wyjściach trójfazowych z wyłączeniem zacisku brakującej fazy. Należy również dodać, że niektóre konstrukcje wyposażone są od strony zacisków wyjściowych we wbudowane obciążenia o niewielkiej rezystancji, w takich konstrukcjach wykonanie poprawnych pomiarów jest bardzo utrudnione i wymaga użycia zaawansowanych przyrządów pomiarowych (np. mostka do pomiaru małych rezystancji).
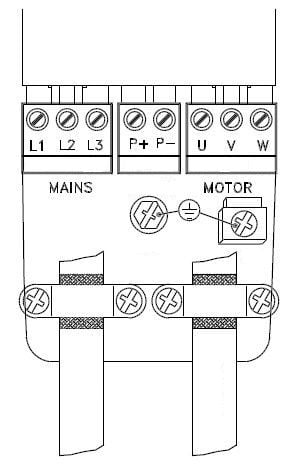
Przed przystąpieniem do pomiarów i po upewnieniu się o braku napięcia na zaciskach falownika, zapewnij sobie swobodny dostęp do punktów pomiarowych, które stanowią zespoły zacisków:
Zasilania (przyłącze sieci) – R, S, T (opisywane również jako L1, L2, L3) lub L1, L2 (albo N) w falownikach z zasilaniem jednofazowym
Wyjściowe (przyłącze silnika) – U, V, W (opisywane również jako M1, M2, M3 albo T1, T2, T3)
Napięcia stałego (na baterii kondensatorów) oznaczane zwykle jako P+, P- (opisy ich jednak mogą być różnorakie, należy sprawdzić to w dokumentacji fabrycznej urządzenia)
Zaciski falownika (przykład)
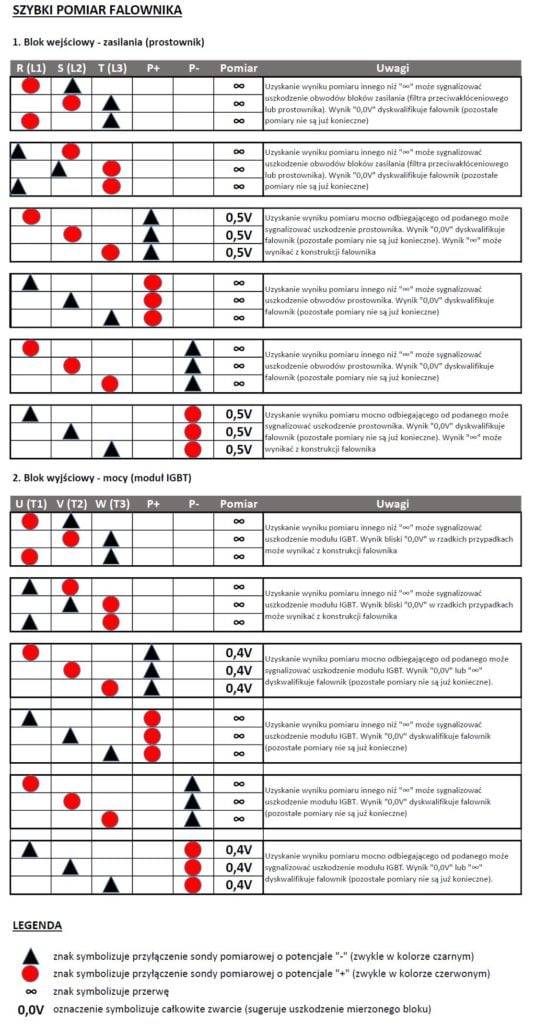
Pomiary należy wykonywać przyrządem ustawionym na zakres pomiaru elementów półprzewodnikowych (zazwyczaj zakres ten jest oznaczony symbolem diody).
Poniżej zamieszczam tabelkę, która obrazuje poszczególne pomiary wraz z ich prawidłowym wynikiem. Niektóre wyniki liczbowe (wartości spadków napięć na złączach półprzewodnikowych) mogą się różnić od wartości przedstawionych w tabeli.
Tabela do pobrania w formie pliku pdf jest dostępna Tutaj.
Pamiętaj, że wykonane pomiary, o których mówi niniejszy artykuł, mają jedynie charakter orientacyjny i mogą być tylko jednym z wielu czynników pozwalających postawić trafną diagnozę uszkodzeń falownika.
Przykład 1. Jeśli podczas jednego z pomiarów bloku zasilania wykryjesz całkowite zwarcie a dodatkowo falownik przyłączony do zasilania uszkadza, „wybija” zabezpieczenia, możesz być prawie pewny, że falownik ten jest definitywnie uszkodzony.
Przykład 2. Jeśli podczas pomiaru bloku wyjściowego jeden z pomiarów wykazuje odchylenie od podanej wartości a pomiary odłączonego silnika nie wykazują anomalii, nie możesz zdiagnozować w 100% uszkodzenia falownika.
Uwaga: Dla pełnej diagnozy napędu należy wykonać również diagnozę otoczenia falownika, w tym celu zapraszamy do przeczytania naszego artykułu „Diagnoza napędów z falownikami„.
Nie próbuj wykonywać samodzielnie napraw, jeśli nie jesteś pewien tego co robisz. W celu zaoszczędzenia czasu i obniżenia mogących powstać w ten sposób dodatkowych kosztów, skorzystaj z wiedzy i doświadczenia wykwalifikowanego serwisu naprawczego.
Firma Elektronika Serwis ani autor tego artykułu nie ponoszą w żadnym wypadku jakiejkolwiek odpowiedzialności za powstałe w wyniku działań inspirowanych niniejszym artykułem straty materialne i/lub uszczerbek na zdrowiu.
… lub powrót do dalekiej przeszłości CA80 or return to a deep past
Mikrokomputer CA80 (bo na swoje czasy na 100% był „mikro”), to pełnowartościowy system procesorowy pracujący pierwotnie pod kontrolą 8-mio bitowego procesora U880 (klon Z80A firmy Zilog), którego głównym przeznaczeniem była nauka programowania mikrokomputerów, ale także elektroniki cyfrowej w ogóle. Został on wymyślony na początku lat 90-tych przez polskiego inżyniera Stanisława Gardynika. Sprzedawany w zestawach do samodzielnego montażu i wspomagany obszerną literaturą autorstwa jego twórcy, która zgromadzona była w kilkunastu dosyć obszernych zeszytach o nazwie „MIK”. Zeszyty te opisywały zarówno podstawy elektroniki, jak i sposób montażu komputerka, jego uruchomienie oraz oprogramowanie. W miarę rozwoju przedsięwzięcia fani doczekali się kilku, może nawet kilkunastu programów użytkowych wraz z adekwatną adaptacją hardware’u.
Krótki opis wersji
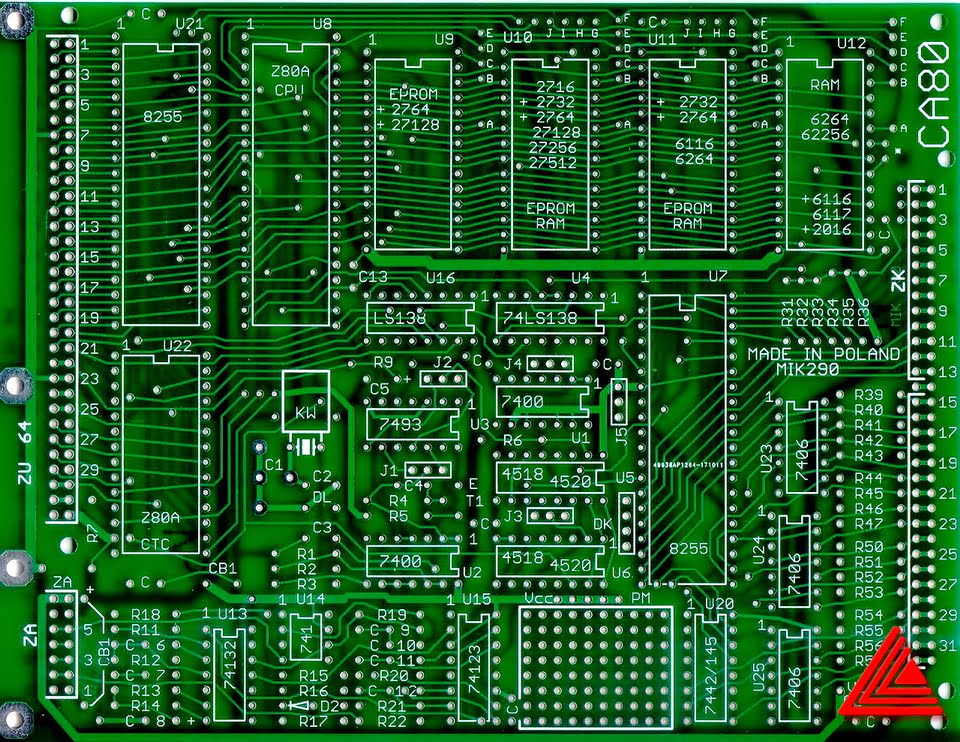
Architektura systemu zawiera prócz mikroprocesora również pamięci RAM i ROM (przewidziano możliwość zastosowania wielu rodzajów pamięci równoległych skupionych w 4 bankach). Są tam także dwa układy portów równoległych 8255 (przeznaczone m.in. do obsługi podstawowych peryferiów, jak klawiatura i wyświetlacz) oraz timer programowalny Z80CTC. Mikrokomputer obsługuje również pamięć masową w postaci magnetofonu kasetowego (obecnie raczej jest to ciekawostka, choć zapis i odczyt można zrealizować w formacie MP3). Historycznie powstały dwie oryginalne wersje mikrokomputera i co za tym idzie i dwie wersje kompatybilnych płytek PCB. Druga z nich to wersja profesjonalna, posiada płytkę o druku dwustronnym oznaczoną jako MIK290 (rys.1.). Wersja ta przystosowana jest do pracy w zamkniętej obudowie pochodzącej od produkowanych wówczas kalkulatorów biurowych Elwro, co wraz z zewnętrznym zasilaczem stanowiło to dosyć zwartą i estetyczną konstrukcję.
rys. 1 Płytka PCB w wersji MK290 (widok od strony elementów)
Jeśli chodzi o tzw. interfejs komunikacji z użytkownikiem, w pierwszej wersji przewidziano klawiaturę o układzie kilkunastu klawiszy, były to cyfry w kodzie szesnastkowym od „0” do „F” oraz kilka podstawowych przycisków funkcyjnych. W drugiej natomiast wersji dołożono kolejne przyciski funkcyjne („F1” do „F4”), tak aby layout zgadzał się z używanym we wspomnianych już kalkulatorach Elwro. Mikrokomputer w wersji defaultowej posiada wyświetlacz lampowy o 8-miu polach 7-mio segmentowych (tzw. ósemki) z segmentem punktu dziesiętnego (DP). Ponieważ coraz bardziej atrakcyjne w tamtym czasie zaczęły być wyświetlacze LEDowe, począwszy od wersji drugiej PCB (MIK290) można było podłączyć do systemu LEDowe zamienniki lamp aż dwóch wersjach: ze wspólną anodą oraz wspólną katodą. Niestety one również mogły mieć jedynie 8 pól, każde po 7 segmentów, tak samo jak ich lampowi protoplaści. Ten ficzer wymagał jeszcze dołożenia jednej z płytek MIK295 lub MIK296, w zależności od wersji posiadanego wyświetlacza: ze wspólną katodą lub wspólną anodą.
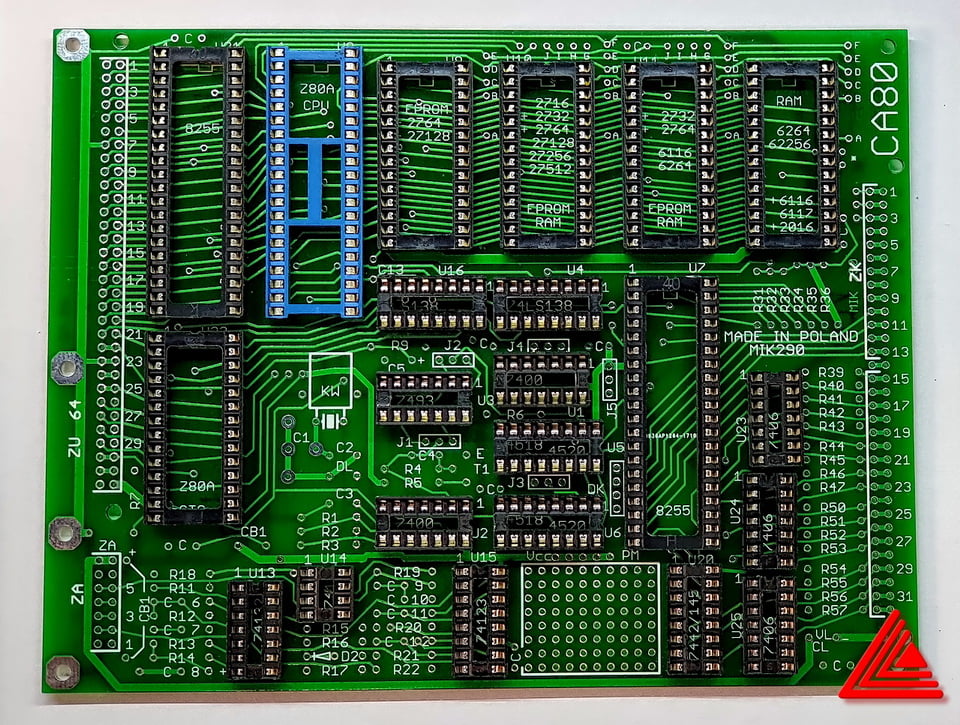
rys.2. Fragment płyty mikrokomputera CA80 obsadzonej oryginalnymi układami scalonymi
Przystępujemy do działania.
Na znanym portalu aukcyjnym można bez przeszkód w chwili obecnej nabyć zestaw układów scalonych oraz płytkę PCB w wersji MIK290. Wśród układów znajduje się zaprogramowana już pamięć EPROM z rozszerzoną wersją oprogramowania dla komputerka oraz „wypasiona” pamięć statyczna RAM 32kB i naturalnie wszystkie pozostałe układy scalone. Opisy zawarte w książeczkach MIK ściągamy przy wydatnej pomocy wujka Google np. z Elektrody lub jednej z kilku dedykowanych dla CA80 stron www. Tam też znajduje się jeszcze wiele ciekawych materiałów, mogących być przydatnymi podczas prac montażowo-rozruchowych.
Zeszyty MIK.
W czasie kiedy trwa dostawa zamówionej płytki oraz części mikrokomputera i po wykonaniu dogłębnego researchingu w temacie oraz ściągnięciu rozlicznych materiałów, jest czas na „przestudiowanie” oryginalnej dokumentacji w postaci legendarnych już zeszytów MIK. Tutaj byłoby wszystko oczywiste, gdyby nie fakt, że mając już jakieś podstawy (a nawet „trochę” więcej niż podstawy) w zakresie wiedzy z dziedziny elektroniki cyfrowej i ogólnej wiedzy o funkcjonowaniu systemów mikroprocesorowych, także opartych na procesorach sprzed 30 z hakiem lat, nie ma najmniejszego sensu zagłębiać się w 8 początkowych zeszytów, gdyż po prostu niewiele jest tam ciekawostek i jakiejś nowej wiedzy. Na uwagę jednak zasługuje zeszyt MIK-09, który jest „core of the cores” wiedzy niezbędnej do poskładania komputerowego ustrojstwa na bazie płyty MIK290.
Niestety trzeba przyznać panu autorowi, że większego chaosu w podawaniu informacji technicznych chyba nie ma nigdzie. Wiedza bardzo podstawowa miesza się w Zeszytach z opisami korzystania z oprogramowania (a my nie mamy jeszcze nawet wstępnie poskładanej płytki), do tego wiele odnośników do wcześniejszych Zeszytów oraz garść powtrącanych przypadkowo zupełnie nieistotnych, z punktu widzenia montażu systemu, informacji. Jeśli przebrniemy już przez te wszystkie meandry i dotrwamy do właściwego opisu montażu PCB, dodatkowym utrudnieniem jest zawarcie wszelkich rysunków i tabel a przede wszystkim schematów ideowych na końcu zeszytu przy czym opis, do których się one odnoszą jest porozrzucany dosyć dowolnie po całym tomie. Utrudnienie to jest tym większe, jeśli korzysta się z wersji Zeszytu w formacie PDF a nie tradycyjnego wydruku papierowego.
Ważna rada: Wydrukować przeto należy co ważniejsze schematy i jeszcze ważniejsze tabele i pasujące do nich opisy, to znacznie ułatwia pracę i minimalizuje powstanie kardynalnych błędów, których i ja się nie ustrzegłem.
Rusza „od strzału” ?
W MIK-09, jak i w rozlicznych materiałach reklamowych z epoki, czytamy dosyć wyeksponowane stwierdzenie: „W większości przypadków, po zmontowaniu układów na płytce, urządzenie zgłasza się poprawnie komunikatem 'CA80′ „. Jest to znamienne twierdzenie i cokolwiek wątpliwa jest jego prawdziwość, szczególnie w zestawieniu z pomocami naukowymi jakie serwuje nam dokumentacja. Tak czy siak należy się wielki szacunek tym, zapewne niezbyt licznym zapaleńcom, którym udało się od „pierwszej kopy” odpalić to ustrojstwo. Trzeba również mimo wszystko oddać hołd autorowi inżynierowi Gardynikowi, gdyż w tamtych zamierzchłych czasach był on pionierem w dziedzinie kitów do samodzielnego montażu i generalnie, w dziedzinie edukacji cyfrowej młodych polskich chłonnych wiedzy głów. Do tego, pewnie cykl wydawniczy zeszytów MIK wymuszał podówczas ich zawartość a trzeba wiedzieć, że powstawały one na przestrzeni kilku lat i „rozwijały” się niejako razem z doświadczeniami ich autora i wraz z tworzeniem kolejnych wersji hardware’u i softu.
Przed przystąpieniem do montażu skompletowanych starannie elementów należy zdecydować, która wersja i jakie ficzery będzie miał nasz systemik. Ja tego niestety nie zrobiłem, wypuszczając się na szeroko pojęty żywioł (wszak zielony przecież całkiem nie jestem a zaprawionym w bojach i owszem), co jednak skończyło się, tak jak się skończyło, czyli śpiesznym wylutowywaniem niepotrzebnie zamontowanych elementów oraz podmianą układów na inne (na szczęście były w podstawkach).
Montaż
Składany przeze mnie system miał zaistnieć pierwotnie w wersji podstawowej, tzn. posiadać miał zakupioną pamięć EPROM i RAM, klawiaturę, wyświetlacz LED oraz zasilanie zewnętrzne (tylko +5V). Ochoczo zabrałem się więc do lutowania podstawek, a później całej masy drobnych elementów biernych i czynnych na płycie. Zdziwieniem moim był prawie brak kondensatorów elektrolitycznych odsprzęgających zasilanie i dosyć duża dowolność w rozmieszczaniu kondensatorów blokujących 100nF. Zaskakująca, jak na dzisiejsze czasy, jest również ilość elementów biernych w ogóle, ale w sumie da się przeżyć, zwłaszcza mając dostęp do obszernego magazynu tychże. Płytka w fazie początkowej montażu jest pokazana poniżej (rys.3).
rys.3. PCB w trakcie montażu.
Wyświetlacz LED
Jak już wspomniałem wyżej, mój system CA80 posiada wyświetlacz LED (ze wspólną katodą). Zeszyt MIK09 zaleca w przypadku takiego wyświetlacza zaopatrzenie się w osobną płytkę MIK295, która obecnie nie jest w zasadzie do zdobycia. Nic to, wyświetlacz został zmontowany na płytce uniwersalnej i skrosowany do listwy ZW płyty głównej (MIK290). Plusem w tym przypadku była możliwość użycia czteropolowych wyświetlaczy LED, co zaoszczędziło trochę żmudnego krosowania. W moim wykonaniu użyłem dwóch wyświetlaczy o wspólnej katodzie, typu TDCG1060M produkcji znanej firmy VISHAY.
Należy zauważyć, że współczesne wyświetlacze LED podczas normalnej pracy pobierają raczej mniejszy prąd niż ten, który konsumowałyby oryginały sprzed 30 lat. Dlatego przy doborze wartości rezystorów Rc i Rb należy zastosować raczej górne z sugerowanych wartości. U mnie były to Rc=120 Ohm, Rb=4,7kOhm.
Ważne: Modyfikacje płytki MIK290 związane z implementacją wyświetlania LED należy wykonać tak, jak to sugeruje MIK09 z tym, że w podstawki układów U23, U24, a także i U25, należy włożyć układy buforów prostych (bez negacji) typu SN74LS07 (lub 74LS17 albo 7407 lub 7417). Taki myk odciąży prądowo i zabezpieczy przed ewentualną pomyłką i zwarciem port równoległy 8255. W podstawkę U20 wkładamy 74145, w miejsce R39 można zastosować dowolną diodę prostowniczą najlepiej na 2A. Na MIK290 nie lutujemy też rezystorów R40 do R47 oraz R50 do R57, o czym to przeczytałem dopiero kiedy płytka MIK290 była już przeze mnie w nie wyposażona.
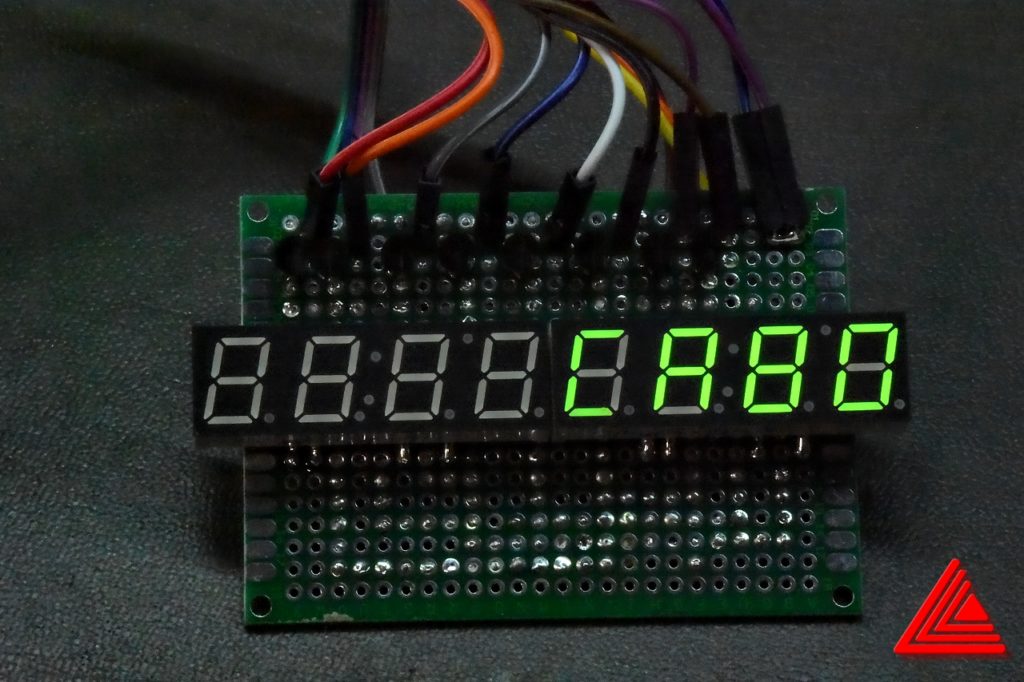
Po zmontowaniu należy wyświetlacz sprawdzić pobudzając jego segmenty poprzez podanie odpowiednich kombinacji logicznych na wyjścia portu U7 (Uwaga: na ten czas układ U7 8255 należy usunąć z podstawki). Jeśli w poprawnie działającym systemie na wyświetlaczu zamiast napisu powitalnego „CA80” widzimy na większości jego pól pełne „ósemki”, warto sprawdzić czy podstawki U20, U23, U24 oraz U25 obsadzone są prawidłowymi dla danego typu wyświetlacza układami. Zmontowany i działający poprawnie wyświetlacz pokazano na rys.5.
rys.5. Zmontowany i uruchomiony moduł wyświetlacza.
Pamięci
Z pamięciami jest niestety ogrom zamieszania. Jest tak z powodu możliwości zastosowania mnogości ich rodzajów o zróżnicowanej wielkości. W zależności od wielkości zastosowanej pamięci należy odpowiednio skrosować punkty oznaczone jako A,B,C,D,E,F oraz czasami G,H,I, ważna jest również zworka J4. Prawidłowe krosy oraz ustawienie J4 opisuje wyczerpująco, acz niezwykle pokrętnie MIK09 w tabeli na str.53 i na schemacie str.56. Przed przystąpieniem do uruchamiania systemu należy rozpisać sobie jakie pamięci i w które podstawki zostaną zainstalowane i jakich wymaga to modyfikacji na płycie. Ułatwia to wydatnie ogarnięcie pamięciowego chaosu i ustrzeżenia się przed kardynalnymi błędami.
Uwaga: Jeśli z dokumentacji w MIK09 wynika, że należy wykonać jakiś kros, na przykład A-D i B-E (jak to ma miejsce podczas obsadzenia podstawki U12 pamięcią 32kB RAM) należy zawsze pamiętać, czy nie koliduje to z krosem defaultowym wykonanym już na PCB. W podanym przypadku należy przeciąć ścieżki tworzące połączenie defaultowe, w tym przypadku pomiędzy punktami A-F oraz B-C. W przeciwnym wypadku dojdzie do zwarcia na szynie adresowej, a to w niesprzyjających okolicznościach może zakończyć się nawet uszkodzeniem cennego procesora.
Z dokumentacji MIK09 nie wynika też wprost, że gdy np. obsadzamy podstawkę U9 pamięcią EPROM 27256 należy jej nogę 27 odizolować od napięcia zasilania +5V i podłączyć do masy. Nie przewidziano najprawdopodobniej zastosowania pamięci o takiej wielkości, jako pamięć ROM.
Ważne: Kluczem do sukcesu jest aby w podstawce U9 znajdowała się zawsze pamięć ROM z procedurą startową systemu, ponieważ procesor zaczyna wykonywanie programu zawsze od adresu 0x0000, zaś w podstawce oznaczonej jako U12 musi znajdować się pamięć RAM.
Klawiatura
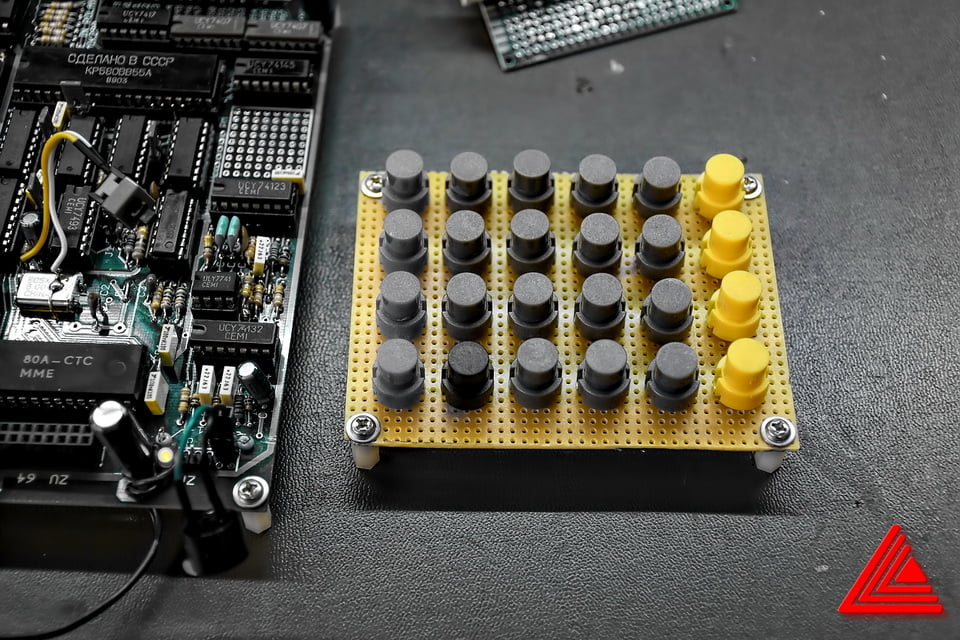
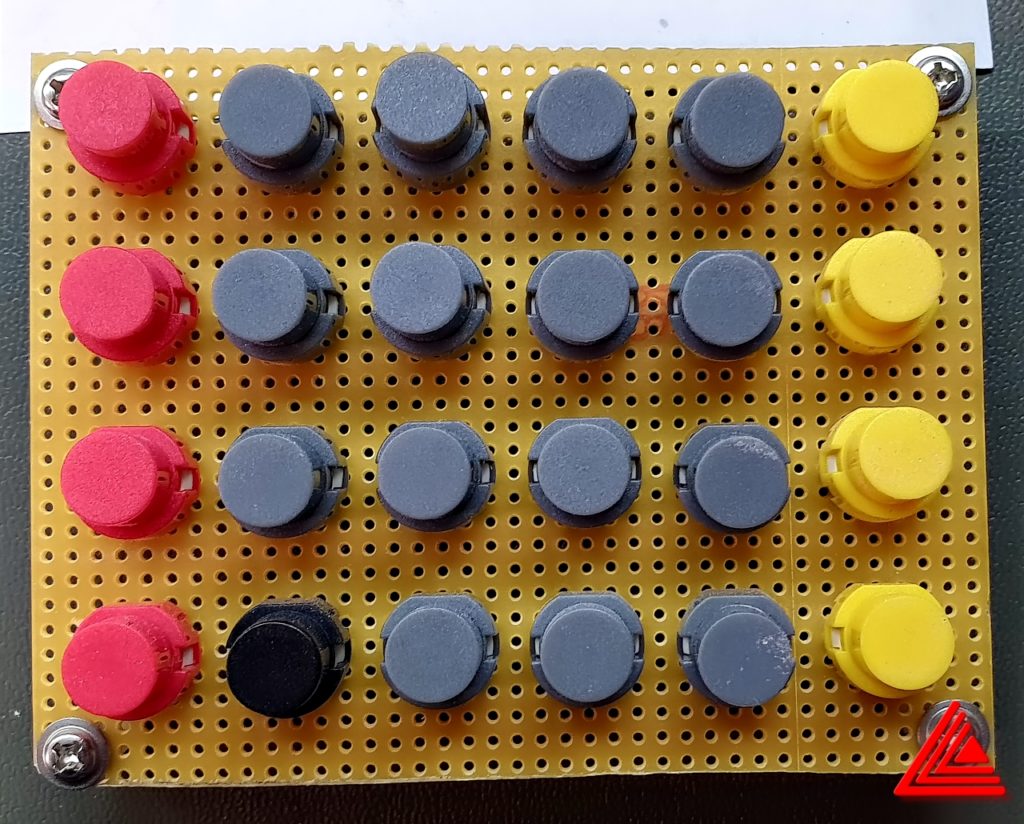
Oryginalna klawiatura od kalkulatora Elwro jest obecnie coraz mniej dostępna. Postanowiłem więc wykonać własną klawiaturę z popularnych przycisków monostabilnych lutowanych wprost do uniwersalnej płytki drukowanej, która następnie została skrosowana na wzór oryginalnej klawiatury według schematu ze str.57 zeszytu MIK09. Układ klawiatury pokazany jest dla utrudnienia na str.19 tegoż zeszytu. Rysunek 6 (poniżej) przedstawia layout klawiatury w fazie tworzenia.
rys.6. Klawiatura w fazie montażu.
W praktyce tak wykonana klawiatura będzie, jak mniemam, raczej niewygodna w użytkowaniu dlatego na dłuższą metę zostanie zastąpiona interfejsem klawiatury komputerowej PS/2. Interfejs taki zostanie przeze mnie wykonany jako pierwsze rozszerzenie hardwre’u mikrokomputera. Przynajmniej takie są plany :).
Zasilanie
Jako, że budowa dedykowanego zasilacza z tzw. „prawdziwego zdarzenia” nie zawsze ma sens, mój system CA80 korzysta z zasilacza zewnętrznego +5V 2A. Mogłem tak zrobić, ponieważ nie potrzebuję napięcia +30V dla wyświetlacza lampowego a napięcie -5V potrzebne w interfejsie magnetofonowym, przewiduję wytworzyć za pomocą miniaturowej przetwornicy izolowanej 5VDC/5VDC 1W np. firmy Aimtec, która to przetwornica spokojnie mieści się na dodatkowym polu montażowym płytki MIK290.
Warto wspomnieć, że nie wykorzystując zasilacza dedykowanego dla CA80, warto wejście zasilania na złączu ZA zabezpieczyć diodą mocy (zabezpieczenie przed odwróceniem zasilania) oraz diodą zenera lub transilem (zabezpieczenie przed podaniem zbyt wysokiego napięcia zasilania). Zamiast transila można też pokusić się o zbudowanie prostego układu z tyrystorem i diodą zenera na jego bramce, którego zadaniem będzie zwarcie do masy zasilania +5V w przypadku przekroczenia granicznej wartości 5,2V.
Uwagi końcowe
Moim zdaniem warto jeszcze wyprowadzić z płytki MIK290 wygodny sygnał RESET, tj. kabelek zakończony przyciskiem monostabilnym. Warto podłączyć go pomiędzy rezystor R9 a masę (zadziwiające, że autor tak mało uwagi poświęca temu sygnałowi, ba nie jest on nawet doprowadzany np. do układów 8255).
Następną kwestią bardzo przydatną w toku uruchamiania systemu jest montaż kołków zasilania +5V i masy, dla łatwego podłączenia miernika, sondy logicznej, czy oscyloskopu lub analizatora stanów logicznych, jeśli ktoś posiada. Najlepiej wykonać to udogodnienie w pobliżu złącza ZA. Ja dodatkowo podlutowałem również czerwoną diodę świecącą, która ma sygnalizować wizualnie obecność napięcia zasilania +5V.
Do kondensatorów blokujących znajdujących się na płycie MIK290 (zwłaszcza tych w pobliżu złącz ZA i ZW) dobrze jest równolegle dołożyć kondensatory elektrolityczne o pojemności przynajmniej kilkudziesięciu mikrofaradów i napięciu pracy minimum 6V. Obserwacje oscyloskopem szyny zasilania pokazują bowiem dosyć wysoki poziom zakłóceń wnoszonych przez poszczególne komponenty systemu.
W mojej konstrukcji zastosowałem kwarc 16MHz, co w konsekwencji dało zegar procesora CLK=4MHz a przerwanie NMI wzbudzane jest z częstotliwością 500Hz. Jest to defaultowe rozwiązanie opisane na samej górze str.54 zeszytu MIK09. Rozwiązanie to wymaga zastosowania w miejsce U5 i U6 układów typu 4518 (w moim przypadku układy te nie wchodziły w skład zakupionego zestawu części dla CA80 i zostały zakupione osobno). Musze przyznać, że jak dotąd nie wykonałem strojenia układu zegarowego, zostawiam to w sumie na potem.
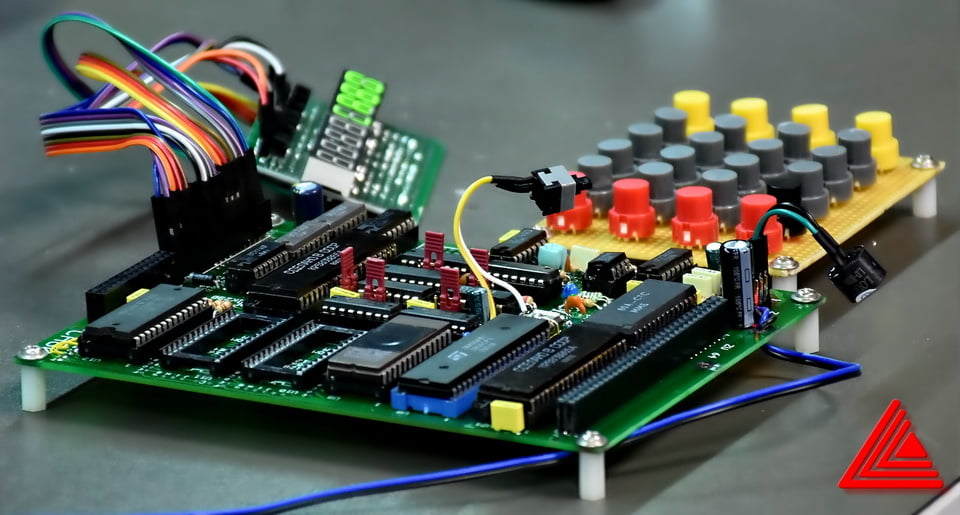
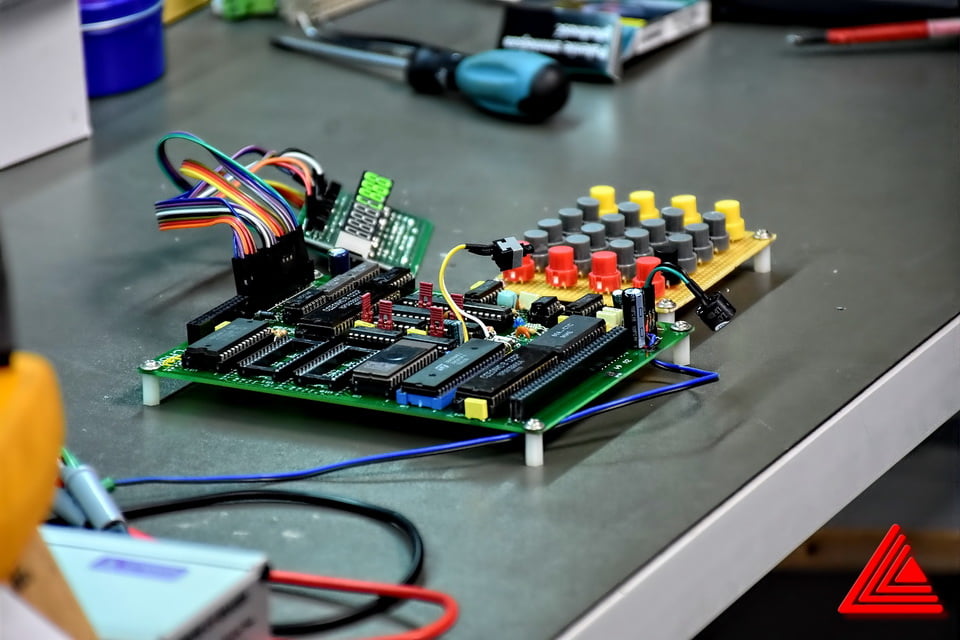
rys.7. CA80 w trakcie uruchamiania.
Wszystkim śmiałkom, którzy zdecydują się na budowę tego „zabytkowego” mikrokomputerka życzę sukcesu i wiele satysfakcji.
Gdyby ktoś chciał się podzielić ze mną swoimi uwagami, zadać pytanie dotyczące uruchamiania tego systemu lub po prostu pochwalić się swoimi sukcesami na tym polu, bardzo proszę o kontakt: elserw@elserw.com lub FB: Elektronika Serwis
… czyli praktyczna wiedza na temat podłączania falownika.*
Co należy zrobić i o czym pamiętać zanim podłączysz falownik ?
Przed podłączeniem falownika należy:
Sprawdzić czy dane techniczne falownika są zgodne z danymi na tabliczce znamionowej silnika oraz czy zasilanie falownika jest odpowiednie do tego, które zostanie do niego przyłączone w maszynie. Napięcie zasilania zawsze sprawdzamy zanim przyłączymy falownik do układu.
Na pewno warto sprawdzić sposób i rodzaj sterowania, ze szczególnym uwzględnieniem zadawania częstotliwości (prędkości). Pomocne tu będą: dokumentacja maszyny (schematy elektryczne) i dokumentacja dostarczona przez producenta / importera montowanego falownika.
Sprawdzić czy falownik jest odpowiednio zaprogramowany a jeśli nie, należy zrobić to zgodnie z jego instrukcją programowania.
Koniecznie sprawdź, czy silnik jest właściwie skonfigurowany (falowniki o zasilaniu jednofazowym – silniki zwykle konfigurowane są „w trójkąt” a o zasilaniu 3-fazowym „w gwiazdę”).
Sprawdzić symetryczność uzwojeń silnika (zwłaszcza jeśli nie podłączamy fabrycznie nowego silnika) – za pomocą omomierza, wykonując na najniższym zakresie pomiarowym 3 pomiary rezystancji uzwojeń silnika od strony zacisków falownika (falownik odłączony oczywiście od układu elektrycznego). Mierzymy rezystancję pomiędzy zaciskami U-V, U-W, V-W, wyniki pomiarów muszą być identyczne, w przeciwnym wypadku sprawdzamy silnik oraz okablowanie.
Przy pomocy miernika izolacji (induktora) należy sprawdzić czy nie ma doziemienia na żadnej z 3 faz od strony zacisków falownika (podczas pomiarów falownik musi być koniecznie odłączony od układu !).
Sprawdzić „ręcznie” (z zachowaniem szczególnej ostrożności !), czy wirnik silnika swobodnie się obraca. Jeśli nie, lub jeśli sprawdzenie takie nie jest możliwe, silnik należy odłączyć mechanicznie od maszyny (np. zdjąć pasek klinowy) i lub wybudować go na zewnątrz.
W razie jakichkolwiek wątpliwości dotyczących silnika, należy oddać go do sprawdzenia i ew. naprawy w specjalistycznej firmie. Próba współpracy falownika z wadliwym silnikiem w większości przypadków kończy się poważnymi konsekwencjami (najczęściej ucierpi na tym falownik).
Przed przyłączeniem falownika można wykonać rzeczywisty test silnika podłączając go bezpośrednio do sieci zasilającej 3-fazowej. Dotyczy to większości silników 3-fazowych, lecz nie wszystkich. (Uwaga: w takim przypadku silnik musi być skonfigurowany zgodnie z jego tabliczką znamionową, zwykle „w gwiazdę”, a jego wirnik musi mieć możliwość swobodnego obrotu – najlepiej odłączyć w tym celu układ mechaniczny).
Przed podaniem napięcia zasilania na falownik (po jego podłączeniu i montażu w maszynie) należy:
Sprawdzić poprawność mechanicznego montażu falownika w maszynie lub rozdzielnicy / szafie sterowniczej. Zwrócić uwagę na minimalne odstępy obudowy falownika od innych urządzeń w szafie (odstępy te oraz inne warunki montażu mechanicznego falownika są opisane w dokumentacji producenta urządzenia i powinny być rygorystycznie przestrzegane, gdyż nie stosowanie się do nich skraca bezawaryjny czas pracy lub w ogóle uniemożliwia falownikowi poprawną pracę).
Sprawdzić poprawność elektrycznego podłączenia falownika, ze szczególnym uwzględnieniem przekrojów i poprawności podłączenia uziemień zarówno od strony zasilania falownika, jak i od strony jego obciążenia (silnika).
Sprawdzić poprawność logiczną i elektryczną podłączenia sygnałów sterujących do zacisków sterowania falownika.
Sprawdzić czy wszystkie parametry zaprogramowanego falownika są poprawne i zgodne z warunkami jego pracy (parametry dot. silnika, sterowania, sposobu normalnej pracy oraz trybów awaryjnych, itd.). Odpowiednie informacje znajdują się zawsze w dokumentacji fabrycznej falownika.
UWAGA: W układzie elektrycznym, pomiędzy zaciskami wyjściowymi falownika a silnikiem nie może być żadnej aparatury rozłączającej, jak styczniki, wyłączniki nadprądowe, itp. (chyba, że producent falownika je dopuszcza, ale sytuacja taka ma miejsce niezwykle rzadko i jest szczegółowo opisana w dokumentacji falownika).
Podczas pracy falownika, tj. gdy falownik jest w trybie „RUN” („Trip”) :
ZABRANIA SIĘ kategorycznie odłączania obciążenia falownika (silnika), ani też przyłączania go (nawet jeśli falownik pracuje testowo i bez obciążenia).
Należy zadbać o bezprzerwowe zasilanie falownika do momentu zatrzymania silnika i przejścia falownika w stan „STOP”. Trzeba pamiętać, że sterowanie zasilaniem falownika musi być odpowiednio skorelowane ze sterowaniem ruchem silnika, tak aby stycznik zasilania (jeśli jest) nie powodował rozłączania zasilania przed zgłoszeniem zatrzymania się falownika (informację o zatrzymaniu można np. pobrać z jednego z wyjść cyfrowych falownika pod warunkiem jednakże, że falownik ten posiada taką możliwość i jest odpowiednio zaprogramowany).
NIE NALEŻY wyłączać zasilania maszyny, a tym samym falownika, kiedy falownik nie jest w trybie „STOP” a silnik nie jest całkowicie zatrzymany. Skraca to wydatnie żywotność falownika, a w pewnych sytuacjach może dojść do niebezpiecznych stanów awaryjnych napędu, z uszkodzeniem urządzeń włącznie.
Należy pamiętać, że po wyłączeniu napięcia zasilania falownika, ponowne jego włączenie jest możliwe po co najmniej 60 sekundach (o ile dokumentacja tego urządzenia nie nakazuje inaczej). Należy rygorystycznie przestrzegać minimum 60 sekundowego cyklu włączania i wyłączania zasilania falownika.
Dozwolona jest dowolna zmiana częstotliwości (prędkości) falownika, jednakże należy pamiętać, że zbyt szybka zmiana nastaw (głównie w przypadku zadawania częstotliwości „ręcznie”, np. za pomocą potencjometru) może doprowadzić do przeciążenia układu napędowego i wystąpienia błędu lub uszkodzenia falownika.
Przy pierwszym uruchomieniu napędu należy zadbać, aby ustawiona częstotliwość wyjściowa falownika była taka sama, jak nominalna częstotliwość pracy silnika (zwykle jest to 50Hz). W szczególnych jednak przypadkach dopuszcza się odstąpienie od tej zasady, jednak zawsze należy mieć na uwadze wystąpienie przeciążenia falownika podczas rozbiegu i związane z tym możliwe konsekwencje dla napędu i samego falownika.
Podczas uruchamiania napędu należy zwrócić uwagę na to, czy silnik rozpędza się i pracuje równomiernie, bez zacięć i ze stabilną prędkością (równomiernym przyśpieszaniem). W razie jakichkolwiek anomalii należy przerwać uruchomienie i wznowić je następnie po odłączeniu wirnika silnika od układu mechanicznego, jeśli ten jest prawdopodobną przyczyną zauważonych nieprawidłowości.
W przypadku wystąpienia błędu sygnalizowanego stanem alarmowym falownika i zatrzymaniem napędu, przed skasowaniem błędu i ponownym rozruchem napędu, należy odczekać określony czas wskazany w dokumentacji fabrycznej falownika (zwykle jest to nie mniej niż 60 sekund).
Należy pamiętać, że desymetryzacja faz lub skokowa zmiana rezystancji obciążenia elektrycznego falownika (np. odłączenie silnika), w większości przypadków skutkuje USZKODZENIEM falownika.
Uruchomienie napędu należy przeprowadzać zawsze przy spełnieniu warunków bezpieczeństwa wynikających ze stosowania odpowiednich instrukcji w tym zakresie. Szczegółowe warunki uruchamiania napędów z falownikami są opisane w dokumentacjach falowników i maszyn przemysłowych, w których pracują.
Jeśli po przeczytaniu powyższego artykułu nie rozumiesz zawartych tutaj informacji lub z różnych przyczyn, nie jesteś w stanie zastosować się do powyższych porad, instalację falownika zleć wykwalifikowanemu specjaliście. Na pewno ograniczy to sumaryczne koszty uruchomienia i spowoduje jego szybki przebieg minimalizując potencjalne sytuacje niebezpieczne dla zdrowia i życia ludzi oraz kondycji maszyn.
Instalację i podłączanie serwo-napędów omówimy w innym artykule
*) Niniejszy artykuł dotyczy podłączania i uruchamiania standardowych falowników skalarnych i wektorowych małych i średnich mocy. Obejmuje on przypadki implementacji tych urządzeń w standardowych aplikacjach napędowych i pracujących w typowym dla nich otoczeniu. Zawarte tu porady mają charakter ogólny i nie rozpatrują przypadków szczególnych zatem pamiętaj, że wszystko co robisz, robisz tylko na własną odpowiedzialność. Firma ELEKTRONIKA SERWIS, a w szczególności autor tego artykułu, nie ponoszą jakiejkolwiek odpowiedzialności za ewentualne skutki Twoich działań.
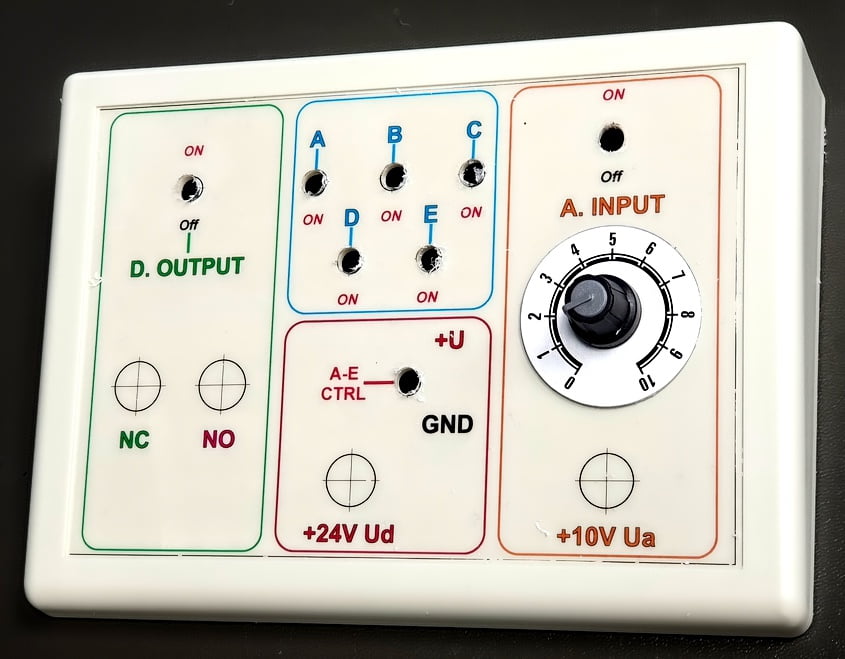
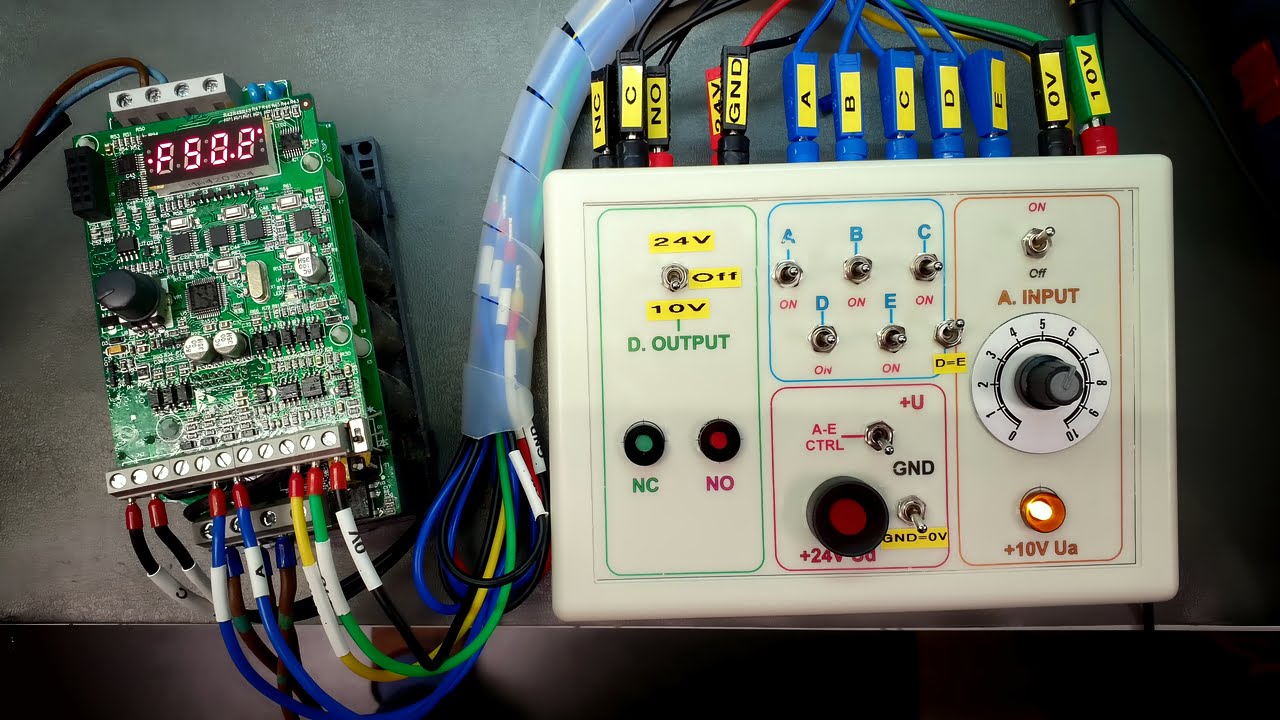
Jak to często bywa „potrzeba matką wynalazku”, powstał więc najpierw schemat a niedługo później gotowe urządzenie, którego główną funkcją jest zadawanie standardowych sygnałów sterowniczych cyfrowych (zarówno podczas sterowania „masą” jak i „plusem”) oraz analogowego, a także badanie w czasie rzeczywistym obecności napięć zasilania wytwarzanych przez podłączony inwerter i stanów pojawiających się na wyjściach cyfrowych tegoż.
O ile schemat połączeń i same połączenia są stosunkowo proste, o tyle już samo wykonanie nie, a to z uwagi na konieczność zamocowania wielu elementów mechanicznych, jak kontrolki, przełączniki, gniazda, itp. i nadanie temu jakiejś estetycznej i uporządkowanej formy.
Podstawowe Parametry Techniczne
kontrola napięć: 24V i 10V
5 wyjść cyfrowych (sterowanie „plusem” – 24V lub sterowanie „minusem” – GND) z możliwością mostkowania wyjść „D” i „E” w wersji rozbudowanej zadajnika
1 wyjście analogowe napięciowe (0-10V), które może pracować jako wyjście prądowe (4-20mA) w wersji rozbudowanej zadajnika
2 wejścia cyfrowe (maks. 24V), w wersji rozbudowanej pracujące również z napięciem 10V
Rozdzielone masy (analogowa i cyfrowa) z możliwością ich połączenia w wersji rozbudowanej zadajnika
połączenie zadajnika z inwerterem za pomocą oznakowanych, kolorowych przewodów uniwersalnych z wtykami bananowymi
Po wielkich bólach i wielu próbach (co widać na fotkach poniżej) urządzenie weszło na stan jako pełnoprawne i nota bene bardzo przydatne narzędzie serwisowe.
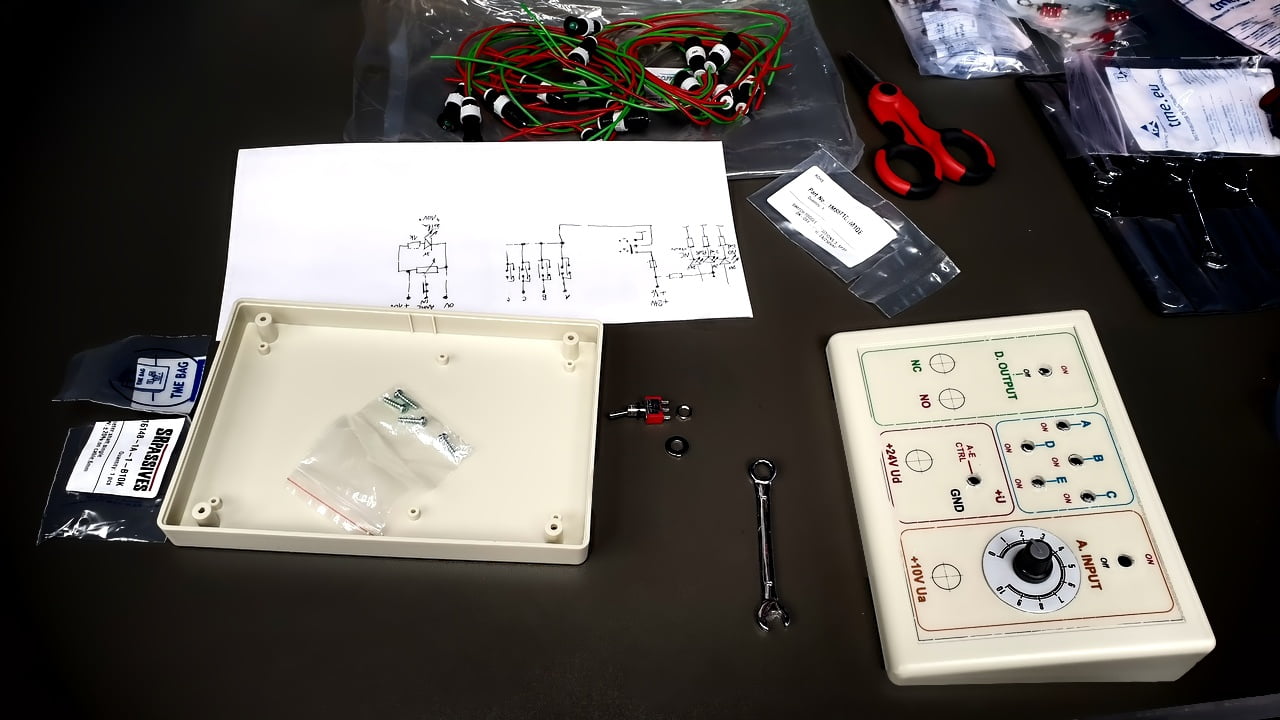
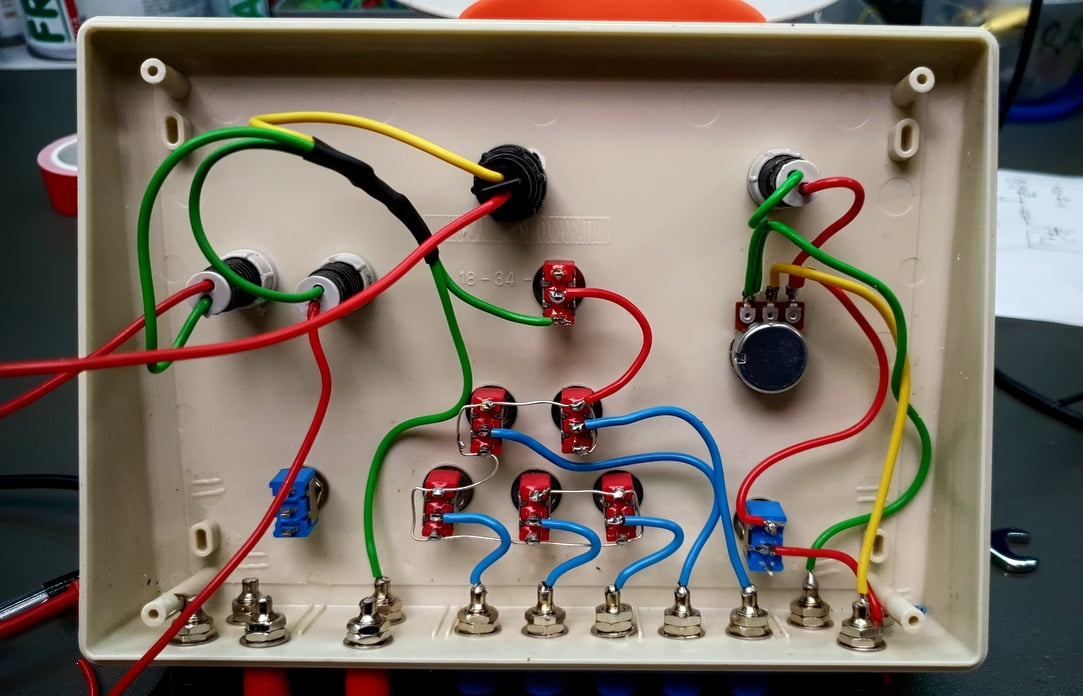
REPORTAŻ z WARSZTATU
Zestaw części i narzędzi – Zaczynamy.
Naklejamy szablon i wiercimy otwory.
Porządnie mocujemy w obudowie wszystkie części
Łączymy według schematu wszystkie elementy zadajnika.
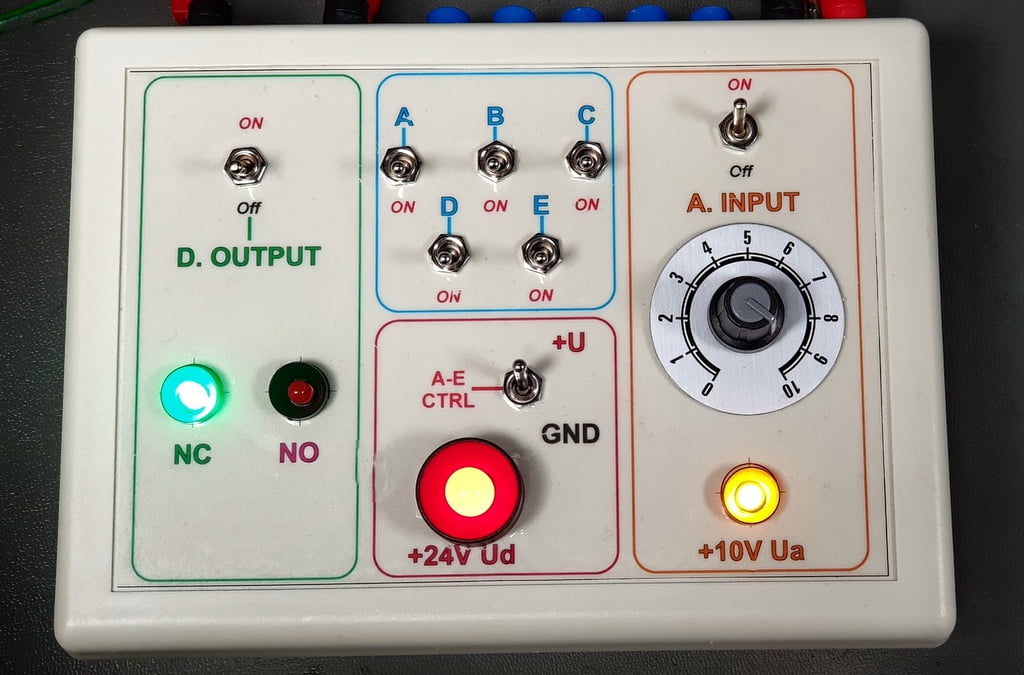
Zadajnik jest gotowy – Sprawdzamy działanie wszystkich układów.
Dodajemy odpowiednio przygotowane i opisane kable połączeniowe.
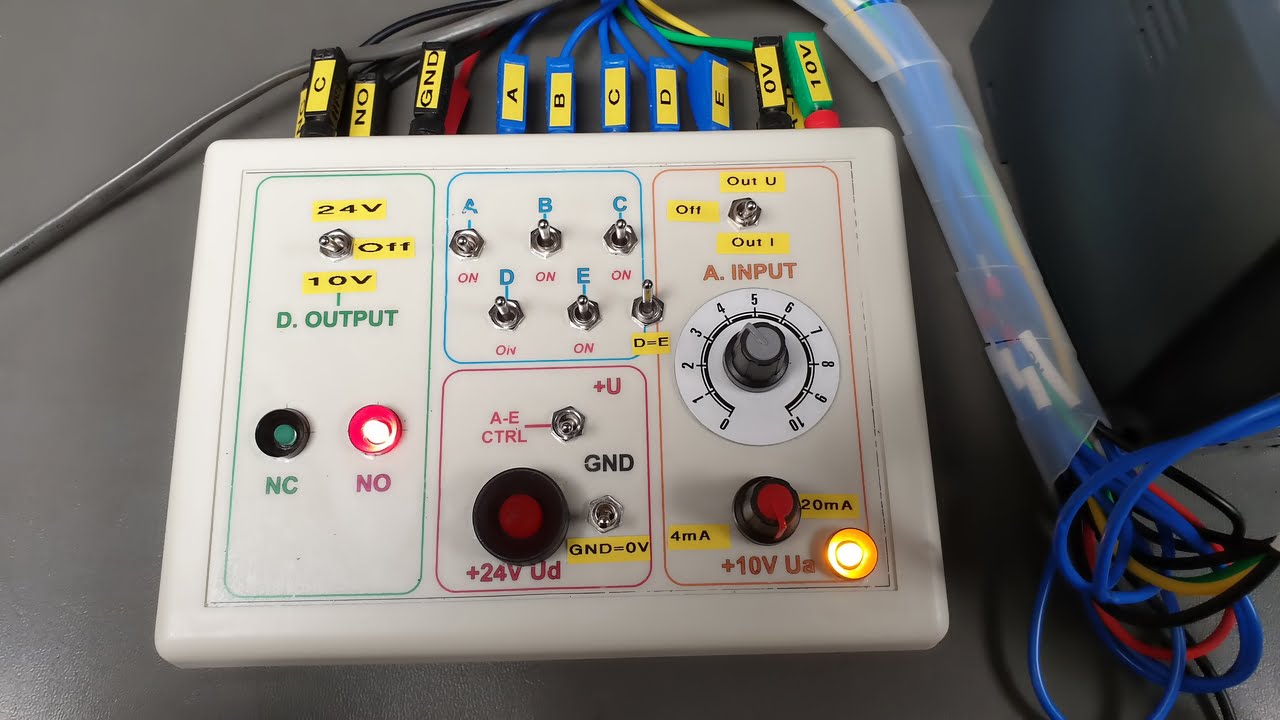
Zadajnik Inwerterów – wersja rozbudowana „full wypas”
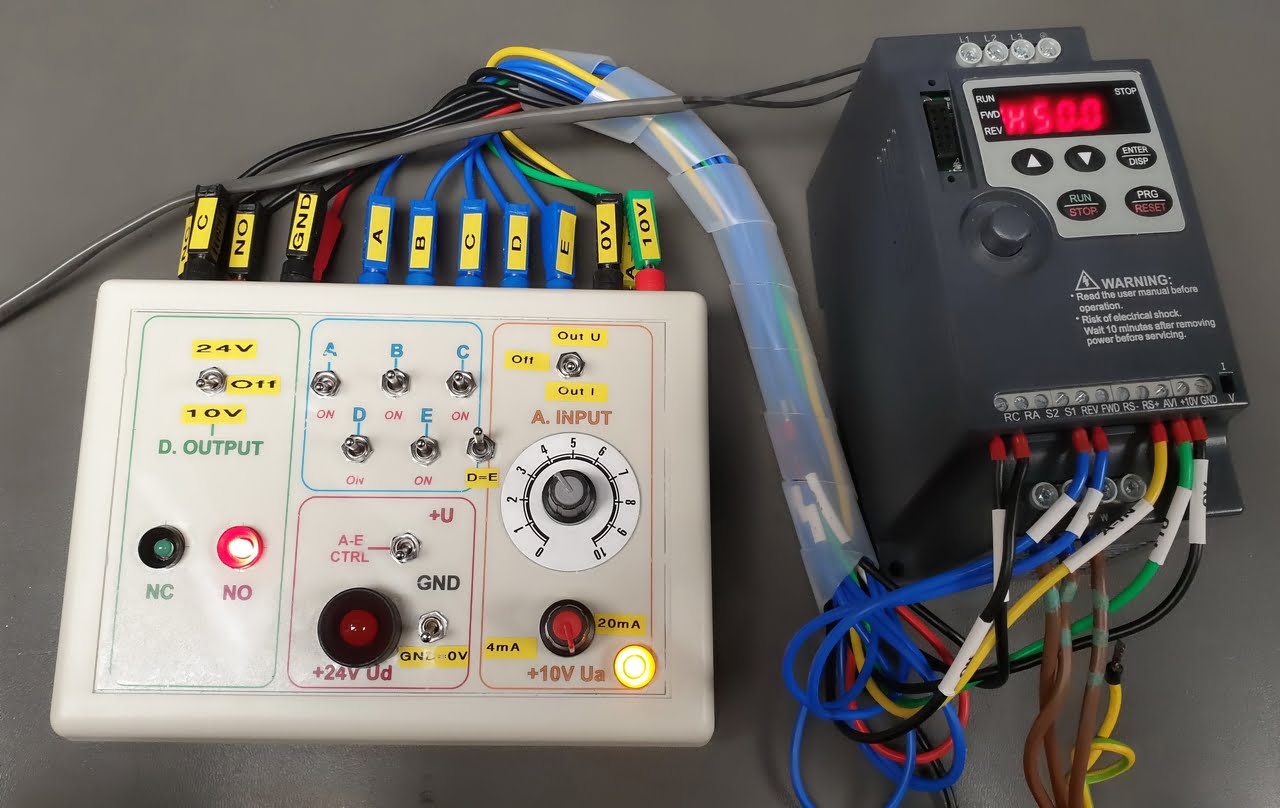
Podczas korzystania z zadajnika okazało się, że warto by dodać jeszcze parę fajnych funkcjonalności między innymi z tego powodu, że niektóre tanie falowniki produkcji „Myfriend” mają pewne, nazwijmy to „upośledzenia” sterowania. Na przykład falowniki firmy Sanyu nie posiadają możliwości sterowania „plusem”, więc na ich listwie zaciskowej w ogóle nie wyprowadzono napięcia +24V, a masa sterowania jest wspólna z masą zadawania napięciowego, co ograniczałoby funkcjonowanie naszego zadajnika.
Tak więc w nowej wersji zadajnik uległ następującym modyfikacjom i modernizacjom:
zasilanie wyjść przekaźnikowych falownika zyskało przełącznik umożliwiający pracę tej części zadajnika z napięcia +10V,
dodatkowy wyłącznik pozwala połączyć masy, analogową i cyfrową we wspólną masę występującą na obydwóch podłączeniach „GND” i „0V”,
zadawanie wejść cyfrowych zyskało możliwość mostkowania dodanym wyłącznikiem kanałów „D” i „E”,
ciekawostką jest dodanie modułu zadawania prądowego z osobnym potencjometrem do jego ustawiania i przełącznikiem, który umożliwia pracę wyjścia „IN-A” jako wyjście prądowe, napięciowe lub odłączenie („off”).
Jedynym problemem stała się warstwa opisowa, która musiała zostać „wzbogacona” o naklejki opisujące dodatkowe funkcje urządzenia.
URZĄDZENIE w AKCJI
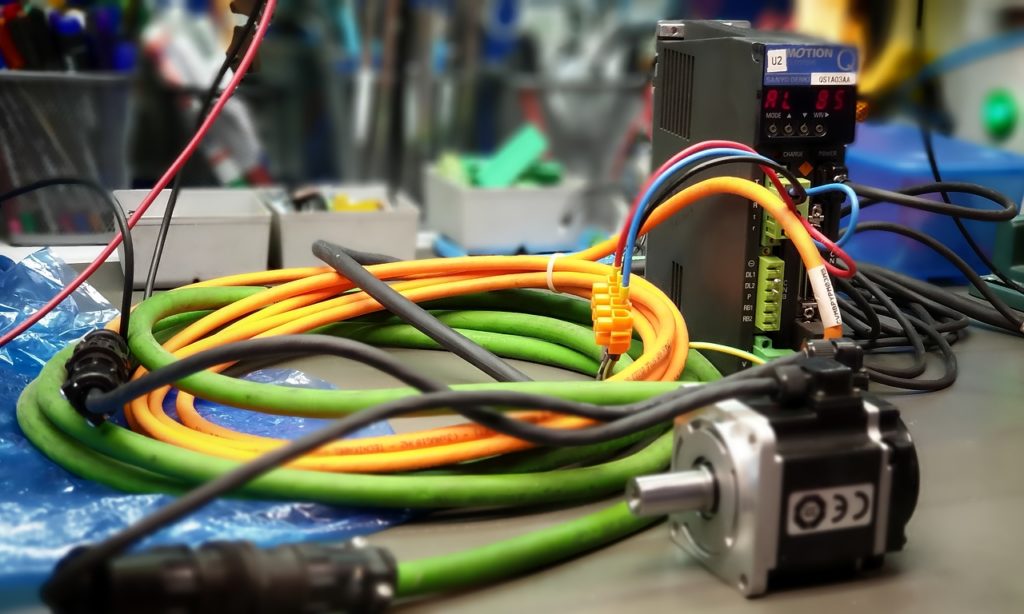
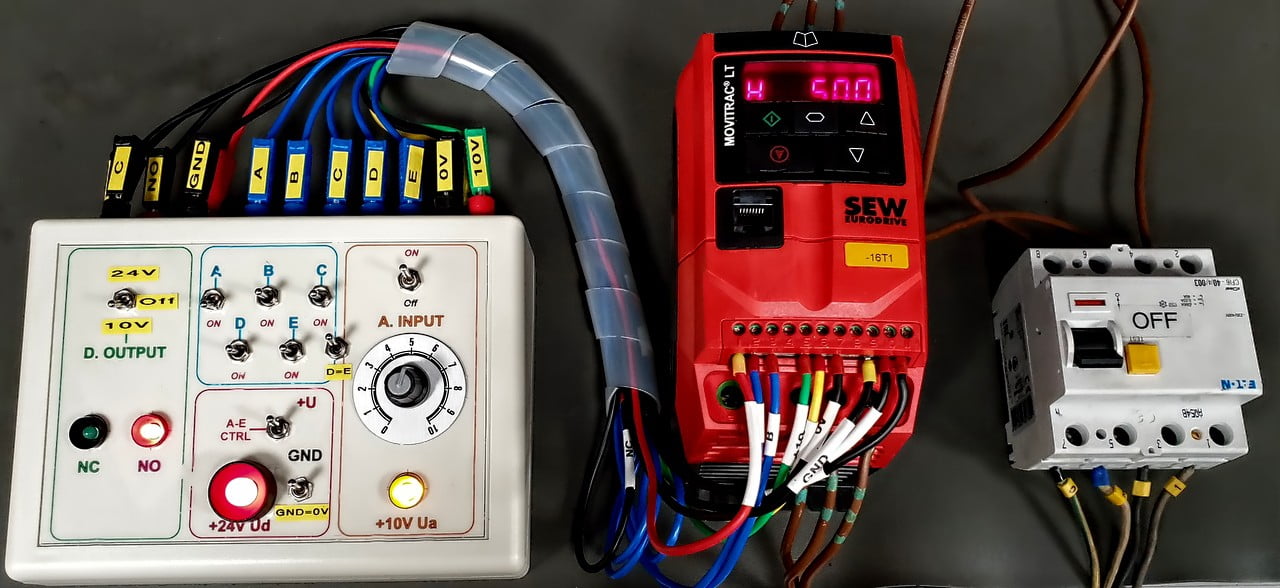
Zadajnik podłączony do falownika SEW, gotowego do pracy.
Falownik w trakcie naprawy.
Zadajnik w wersji rozbudowanej współpracuje także z urządzeniami firmy Sanyu i innymi inwerterami niskobudżetowymi.
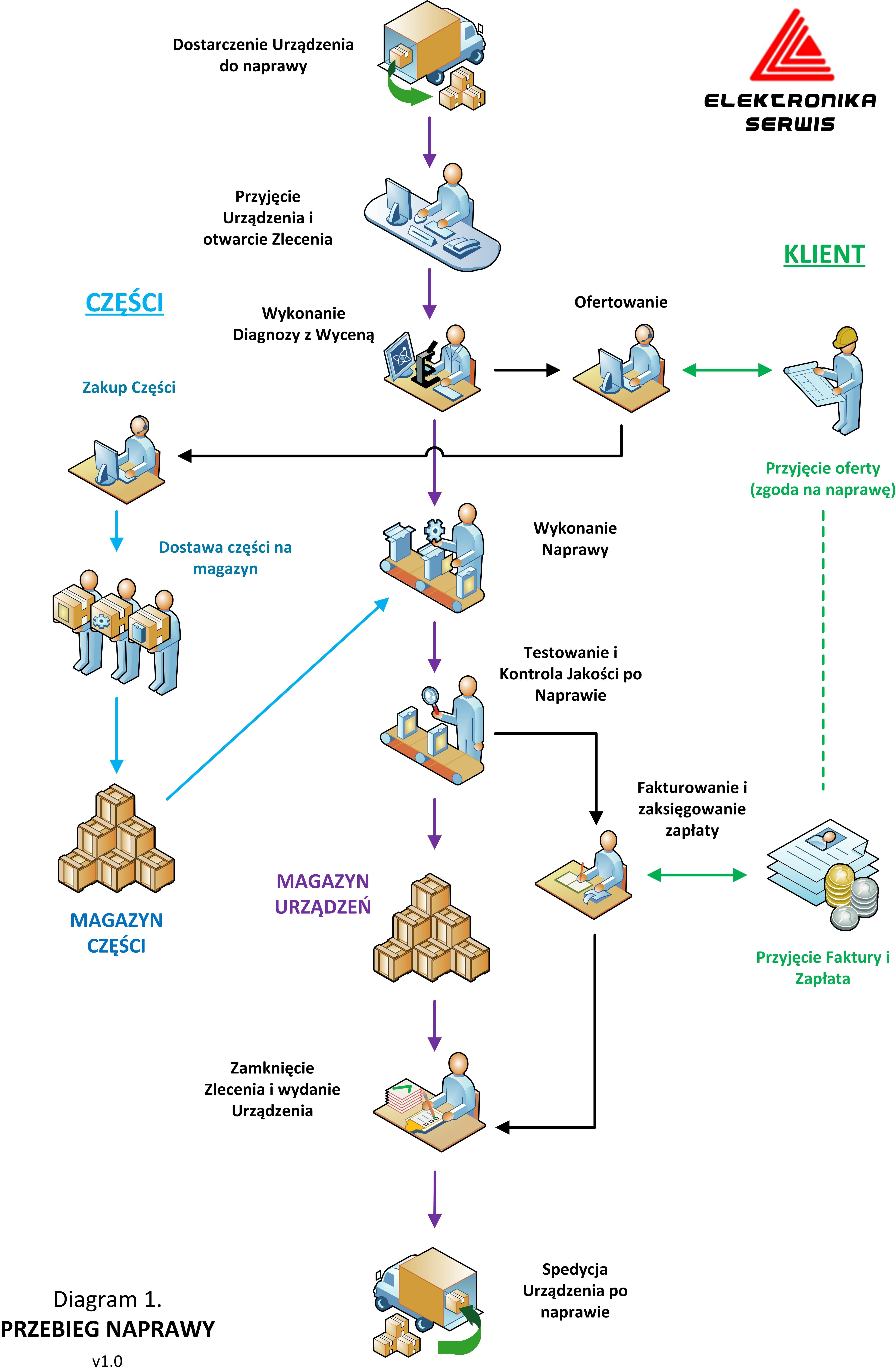
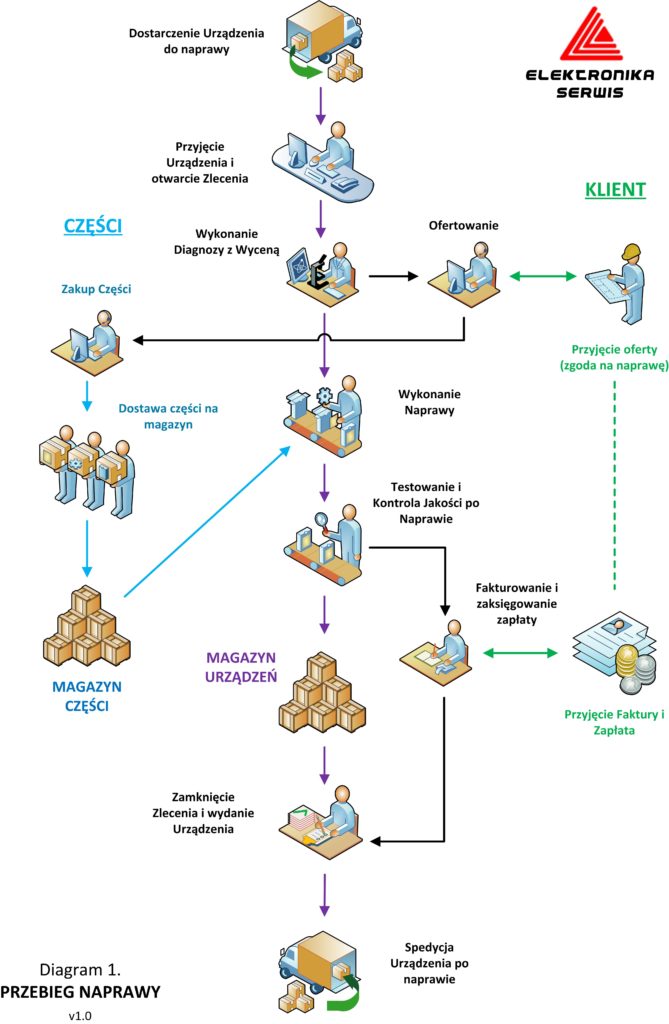
Poniżej przedstawiamy Państwu diagram obrazujący przebieg naprawy każdego z serwisowanych u nas urządzeń, od momentu jego dostarczenia aż do zakończenia naprawy i wysyłki do Klienta.
NINIEJSZA STRONA KORZYSTA Z PLIKÓW COOKIE.
Wykorzystujemy pliki cookie do spersonalizowania treści i reklam oraz aby analizować ruch w naszej witrynie.