Twój falownik pokazuje błąd, wybija zabezpieczenia, nie rusza silnika ? Masz ochotę odesłać go do serwisu ? Zanim to zrobisz, warto wykonać kilka pomiarów aby uzyskać wstępną diagnozę.

Poniżej przedstawię bardzo prostą i szybką metodę pomiarów diagnostycznych falownika w celu ustalenia jego niedomagań. Zanim jednak przystąpisz do pracy, przeczytaj cały artykuł i zastanów się, czy jesteś w stanie wykonać wszystko co tu opisałem, zachowując przy tym warunki bezpieczeństwa ludzi i sprzętu.
Artykuł dotyczy większości falowników / inwerterów / przemienników częstotliwości / serwoinwerterów / serwowzmacniaczy / serwodriwerów o konstrukcji zawierającej układ zasilania jedno- lub trójfazowy oraz układ wyjściowy mocy oparty na tranzystorach lub modułach IGBT w standardowej konfiguracji. Może się jednak zdarzyć, że będziesz miał do czynienia z nietypowymi rozwiązaniami układowymi wykluczającymi wykonanie opisanych przeze mnie pomiarów.
Narzędzia
Przed przystąpieniem do prac przygotuj podstawowe narzędzia, jak na przykład wkrętak (rozmiarem przystosowany do śrub na zaciskach mierzonego falownika). Najważniejszym jednak jest przyrząd pomiarowy. Do naszych celów wystarczy zwykły cyfrowy lub analogowy miernik uniwersalny z opcją pomiaru złącz półprzewodnikowych (zwykle jest to zakres pomiarowy oznaczony symbolem diody). Miernik powinien być wyposażony w sondy pomiarowe i co ważne, w źródło zasilania (baterię) o dobrej kondycji.
Przygotowanie

Przed przystąpieniem do prac odłącz zasilanie falownika wyłącznikiem sieciowym (głównym) maszyny oraz upewnij się, używając posiadanego miernika lub specjalnego testera, czy na przyłączach falownika nie występuje prąd elektryczny.

Odczekaj koniecznie czas potrzebny na rozładowanie się kondensatorów wysokonapięciowych ! Czas ten jest zwykle określony przez producenta i oznaczony na obudowie falownika lub zamieszczony w jego dokumentacji. Niektóre urządzenia posiadają też odpowiednio oznaczoną, zazwyczaj czerwoną, kontrolkę informującą o obecności napięcia na kondensatorach falownika.
Jeśli nie wiesz ile czasu powinieneś odczekać przed przystąpieniem do dalszych prac, załóż bezpieczny czas np. 30 minut. Dla falowników dużej mocy, czas powinien być odpowiednio dłuższy.
Możesz również zmierzyć napięcie pomiędzy zaciskami falownika oznaczanymi zwykle P+ i P- (jeśli Twój falownik takie posiada), jest to napięcie występujące na baterii kondensatorów wysokonapięciowych. Jeśli napięcie to jest większe niż kilka voltów, odczekaj do momentu jego bezpiecznego samoczynnego obniżenia (rozładowania się kondensatorów).
Uwaga: Całkowity brak mierzonego napięcia może być również efektem niesprawności falownika, w takim przypadku zaleca się specjalną ostrożność.
Pamiętaj: Dalsze prace możesz prowadzić jedynie przy stanie beznapięciowym na wszystkich zaciskach falownika !

Teraz odłącz wszystkie przewody elektryczne od strony zasilania oraz od strony przyłączy silnika (również te podłączone do rezystora hamującego, jeśli został zaimplementowany). Przewody PE oraz te, podłączone do zacisków niskonapięciowych sterowania mogą pozostać podłączone.
Sprawdź czy na pewno dobrze wykonałeś powyższe zadanie, w przeciwnym wypadku wyniki pomiarów mogą być błędne a Twój przyrząd pomiarowy będzie narażony na uszkodzenie.
Dla pewności braku napięcia na obwodach mocy falownika i ochrony Twojego przyrządu pomiarowego, na zaciski P+ i P- falownika możesz założyć tymczasowo zworkę z odcinka przewodu lub rezystora rozładowczego o rezystancji kilka kiloomów i mocy kilku watów.
Zworkę tę należy usunąć bezpośrednio przed wykonywaniem pomiarów.
Konstrukcja falownika
W naszych pomiarach traktujemy falownik jako „czarną skrzynkę”, jednak dobrze jest zapoznać się z jego ogólną konstrukcją, aby lepiej zinterpretować otrzymane wyniki.
W znakomitej większości falowników, zwłaszcza małych i średnich mocy, możemy wyróżnić 2 główne bloki, które opiszemy w dalszej treści:
- Blok wejściowy – zasilania
- Blok wyjściowy – mocy
ad.1. BLOK ZASILANIA
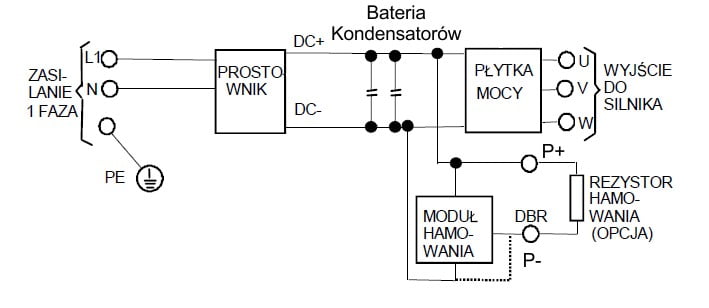
Blok zasilania składa się zazwyczaj z filtra przeciwzakłóceniowego (czasami filtr taki stanowi oddzielony mechanicznie i elektrycznie moduł, zamontowany często pod radiatorem falownika lub obok niego), oraz obwodu prostownika 1 lub 3 fazowego i baterii kondensatorów.
Prostownik w falownikach małej i średniej mocy zrealizowany jest (szczególnie w tańszych i prostszych modelach) w oparciu o standardowy diodowy, pasywny mostek Graetz’a, czasami zaś jest to mostek sterowany (prostownik aktywny) zrealizowany w oparciu o diody sterowane (tyrystory).
Niezależnie od przyjętego rozwiązania, zadaniem prostownika jest zamiana przemiennego napięcia sieci dostarczonego do falownika, na napięcie stałe służące do zasilenia jego obwodów mocy.
Powstałe za prostownikiem tętnienia prądu są wygładzane za pomocą baterii kondensatorów, która to składa się z jednego lub wielu wysokonapięciowych kondensatorów elektrolitycznych. Pełni ona również bardzo ważną rolę w magazynowaniu i oddawaniu energii w trakcie normalnej pracy falownika.
W przypadku zasilania falownika z jednofazowego napięcia sieci elektroenergetycznej 230VAC, na zaciskach baterii kondensatorów filtrujących pojawia się napięcie ok. 325VDC. W przypadku zaś, kiedy urządzenie zasilane jest trójfazowo z sieci o napięciu międzyfazowym 400VAC, napięcie na kondensatorach wynosi ok. 565VDC.
W praktyce, ze względu na wahania napięcia sieci, jej brak symetrii oraz jakość samych kondensatorów, powyższe napięcia mogą się różnić od wyżej podanych.
Czasami falownik przystosowany jest do zasilania innymi napięciami, lecz nie ma to większego znaczenia dla naszych pomiarów.
Napięcie na baterii kondensatorów jest wyprowadzane zazwyczaj na zaciski falownika oznaczane zwykle jako P+ i P-. Niestety nie wszystkie falowniki mają je dostępne, zwłaszcza urządzenia małej mocy posiadają wyprowadzony jedynie zacisk P+. W takim przypadku nie wykonamy pełnych pomiarów chyba, że zapewnimy sobie dostęp do brakującego zacisku wewnątrz urządzenia.
W skład układu zasilania wchodzi także rezystor startowy. Szerzej o tym rezystorze można przeczytać tutaj.
Rezystor startowy jest umieszczany zwykle szeregowo pomiędzy wyjściem prostownika a baterią kondensatorów filtrujących. Ma on za zadanie ograniczenie prądu ładowania kondensatorów w fazie po włączeniu zasilania. Dzieje się tak, gdyż jego rezystancja wraz z pojemnością kondensatorów tworzą pewną stałą czasową opóźniającą ich ładowanie zmniejszonym prądem.
Procesor falownika sterujący fazą rozruchu urządzenia, po określonym czasie, zwiera (zazwyczaj za pomocą stycznika) zaciski rezystora startowego eliminując tym samym jego wpływ na obwód zasilania falownika w dalszej fazie pracy.
Należy pamiętać, że w konstrukcjach opartych o aktywne zespoły prostownicze (mostki tyrystorowe) rezystor startowy nie jest zwykle stosowany, gdyż sterownik prostownika odpowiednio reguluje prąd ładowania baterii kondensatorów.
W trakcie wykonywania naszych pomiarów, warto uwzględnić obecność rezystora startowego, który podczas pomiarów obwodów zasilania stanowi rezystancję szeregową.
ad.2. BLOK WYJŚCIOWY
Blok wyjściowy falowników jest zwykle zrealizowany w oparciu o moduł lub moduły zwierające tranzystory IGBT. W mniejszych falownikach spotkać można pojedyncze tranzystory IGBT, lecz jest to już coraz rzadszy przypadek. Niezależnie od konstrukcji, z punktu widzenia jego działania, blok wyjściowy ma za zadanie zamienić prąd stały dostarczony z bloku zasilania a konkretnie z jego baterii kondensatorów, na przebieg zmienny (przemienny trójfazowy).
Istnieją również falowniki posiadające wyjścia jednofazowe, jednak nimi nie będziemy się tutaj zajmować, gdyż stanowią mniejszość i obejmują jedynie falowniki małych mocy. Ich pomiar jest identyczny, jak dla falowników o wyjściach trójfazowych z wyłączeniem zacisku brakującej fazy.
Należy również dodać, że niektóre konstrukcje wyposażone są od strony zacisków wyjściowych we wbudowane obciążenia o niewielkiej rezystancji, w takich konstrukcjach wykonanie poprawnych pomiarów jest bardzo utrudnione i wymaga użycia zaawansowanych przyrządów pomiarowych (np. mostka do pomiaru małych rezystancji).

Zobacz też https://falowniki.edu.pl/budowa-falownika-informacje-ogolne
Pomiary
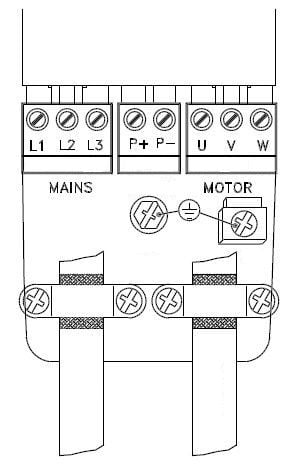
Przed przystąpieniem do pomiarów i po upewnieniu się o braku napięcia na zaciskach falownika, zapewnij sobie swobodny dostęp do punktów pomiarowych, które stanowią zespoły zacisków:
- Zasilania (przyłącze sieci) – R, S, T (opisywane również jako L1, L2, L3) lub L1, L2 (albo N) w falownikach z zasilaniem jednofazowym
- Wyjściowe (przyłącze silnika) – U, V, W (opisywane również jako M1, M2, M3 albo T1, T2, T3)
- Napięcia stałego (na baterii kondensatorów) oznaczane zwykle jako
P+, P- (opisy ich jednak mogą być różnorakie, należy sprawdzić to w dokumentacji fabrycznej urządzenia)
Pomiary należy wykonywać przyrządem ustawionym na zakres pomiaru elementów półprzewodnikowych (zazwyczaj zakres ten jest oznaczony symbolem diody).
Poniżej zamieszczam tabelkę, która obrazuje poszczególne pomiary wraz z ich prawidłowym wynikiem. Niektóre wyniki liczbowe (wartości spadków napięć na złączach półprzewodnikowych) mogą się różnić od wartości przedstawionych w tabeli.
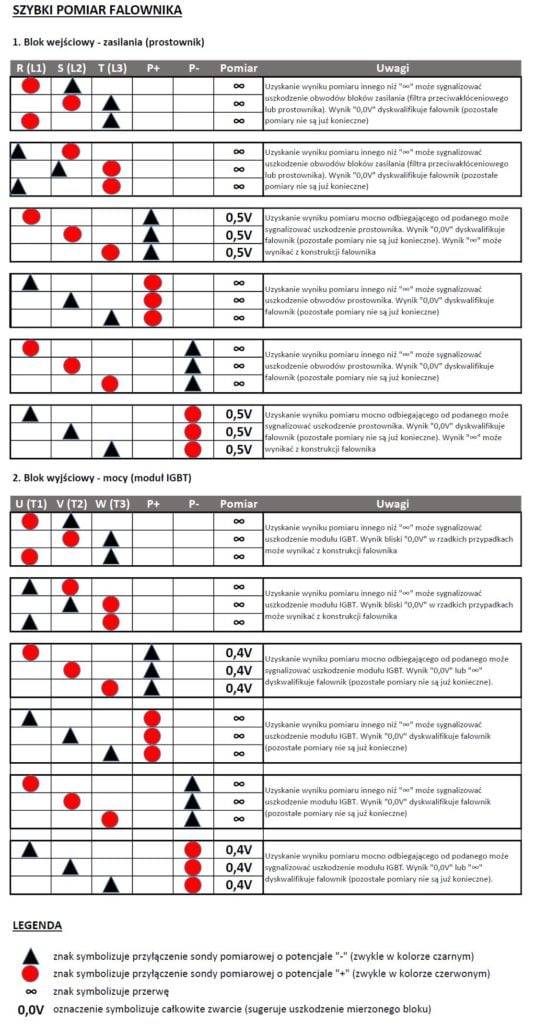
Tabela do pobrania w formie pliku pdf jest dostępna Tutaj.
Pamiętaj, że wykonane pomiary, o których mówi niniejszy artykuł, mają jedynie charakter orientacyjny i mogą być tylko jednym z wielu czynników pozwalających postawić trafną diagnozę uszkodzeń falownika.
Przykład 1. Jeśli podczas jednego z pomiarów bloku zasilania wykryjesz całkowite zwarcie a dodatkowo falownik przyłączony do zasilania uszkadza, „wybija” zabezpieczenia, możesz być prawie pewny, że falownik ten jest definitywnie uszkodzony.
Przykład 2. Jeśli podczas pomiaru bloku wyjściowego jeden z pomiarów wykazuje odchylenie od podanej wartości a pomiary odłączonego silnika nie wykazują anomalii, nie możesz zdiagnozować w 100% uszkodzenia falownika.
Uwaga: Dla pełnej diagnozy napędu należy wykonać również diagnozę otoczenia falownika, w tym celu zapraszamy do przeczytania naszego artykułu „Diagnoza napędów z falownikami„.
Nie próbuj wykonywać samodzielnie napraw, jeśli nie jesteś pewien tego co robisz. W celu zaoszczędzenia czasu i obniżenia mogących powstać w ten sposób dodatkowych kosztów, skorzystaj z wiedzy i doświadczenia wykwalifikowanego serwisu naprawczego.
Firma Elektronika Serwis ani autor tego artykułu nie ponoszą w żadnym wypadku jakiejkolwiek odpowiedzialności za powstałe w wyniku działań inspirowanych niniejszym artykułem straty materialne i/lub uszczerbek na zdrowiu.